1. 背景:EOF/PCAは何をしているのか
EOF(Empirical Orthogonal Function)解析は、気象・海洋データでよく使われる方法である。統計学や機械学習では PCA(Principal Component Analysis:主成分分析)と呼ばれる。ここでは、EOF と PCA を同じ数学的操作として扱う。
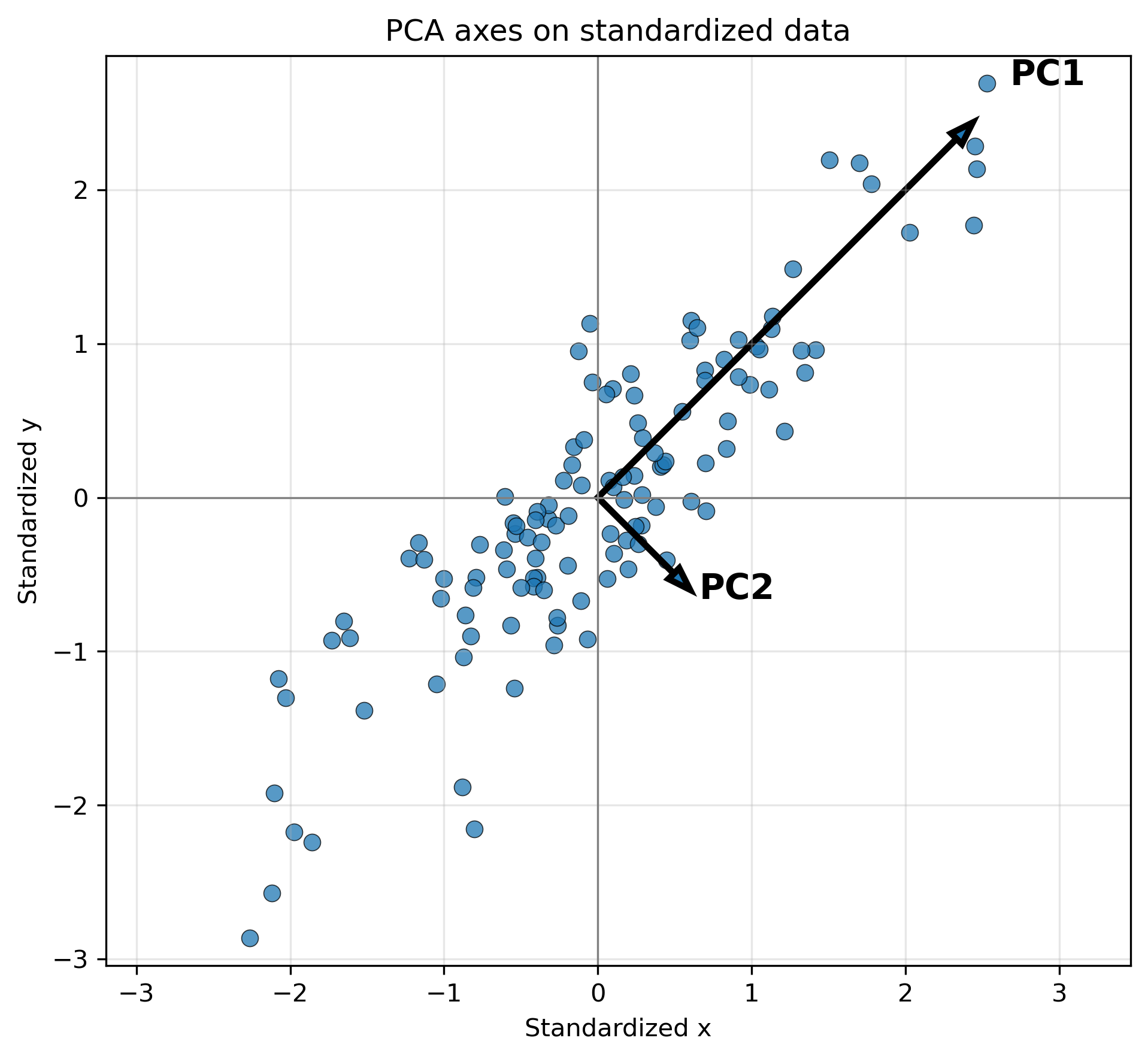
EOF/PCAがしていることを一言でいうと、データのばらつきが最も大きい方向を探すことである。2次元散布図で考えると、点群が細長く伸びている方向が第1主成分 PC1、PC1 に直交する方向が第2主成分 PC2 になる。
2. 今回使う2次元データ
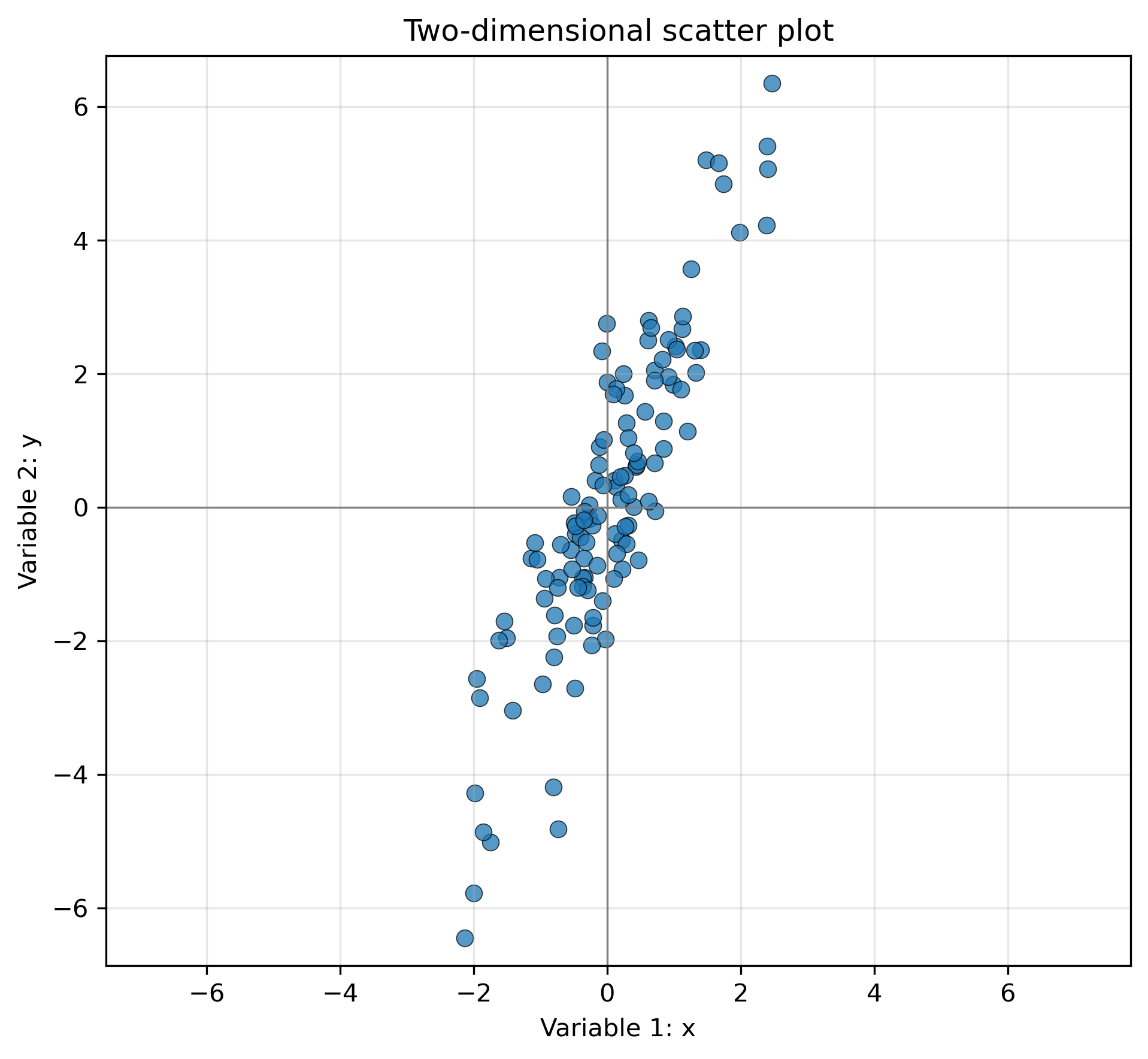
今回は、Pythonで x と y の2変数からなる疑似データを作る。y は x にある程度比例するように作るため、散布図は斜め方向に細長く広がる。
1つの点 = [x, y] という2つの値を持つサンプルこの点群に EOF/PCA を適用すると、散布図の長い方向が PC1、短い方向が PC2 として求まる。
| 記号 | 意味 |
|---|---|
| x, y | 元の2つの変数 |
| X | 行がサンプル、列が変数のデータ行列 |
| PC1 | データのばらつきが最も大きい方向 |
| PC2 | PC1に直交する第2の方向 |
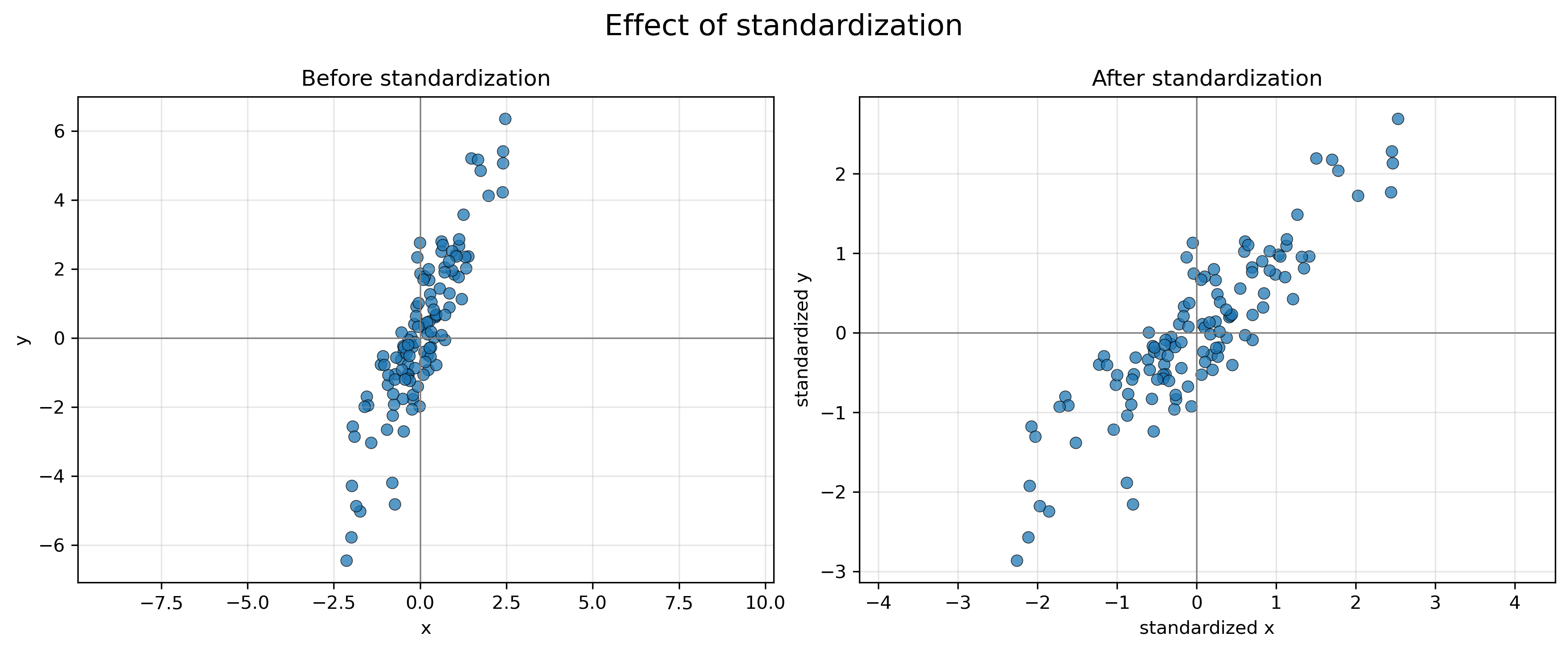
3. なぜ標準化するのか
EOF/PCAでは、分散が大きい変数ほど結果に強く効く。もし x と y の単位や大きさが違う場合、単位の大きい変数だけで主成分が決まってしまうことがある。
そこで、各変数について平均を引き、標準偏差で割る。これを標準化という。
標準化後は、各変数の平均が 0、標準偏差が 1 になる。これにより、x と y を同じスケールで比較できる。
4. 共分散行列とは何か
EOF/PCAでは、まずデータのばらつき方を行列として表す。この行列が共分散行列である。2変数の場合、共分散行列は 2 × 2 の行列になる。
| 成分 | 意味 |
|---|---|
| var(x) | x がどれくらいばらつくか |
| var(y) | y がどれくらいばらつくか |
| cov(x,y) | x と y が一緒に増減するかを表す量 |
x と y が一緒に増えたり減ったりする場合、共分散は正になる。散布図が右上がりに伸びる場合である。逆に、一方が増えるともう一方が減る場合は、共分散は負になる。
標準化したデータでは、x と y の分散はおおむね 1 になる。そのため、共分散行列は「2つの変数がどの方向に一緒にばらつくか」を見る行列として扱いやすくなる。
5. なぜ固有値・固有ベクトルが出てくるのか
ここまでで、EOF/PCA は「データのばらつきが最も大きい方向を探す方法」である、と説明した。しかし、ここでいきなり固有値・固有ベクトルを出すと、何のための計算なのかが見えにくい。
この節では、次の順番で考える。
- まず、散布図の中に新しい軸を引く。
- その軸にデータを投影する。
- 投影された値の分散を計算する。
- 分散が最大になる軸を探す。
- その問題を解くと、固有値・固有ベクトルが現れる。
5.1 まず「軸の向き」をベクトルで表す
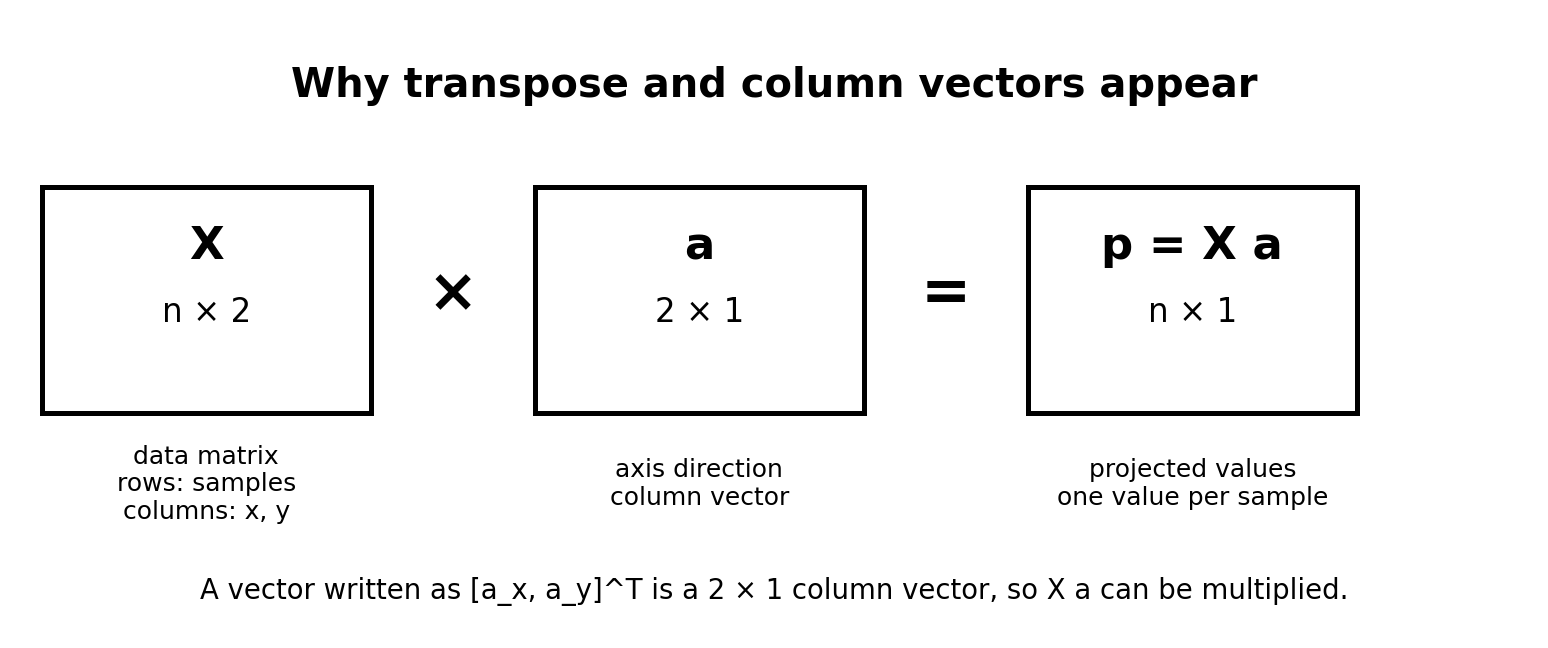
2次元データの1つの点を [x, y] とする。散布図の中に、新しい軸を1本引く。この軸の向きを、ベクトル a で表す。
T は transpose(転置)を表す。ここでは [ax, ay] と横に書いたものを、計算では縦ベクトルとして扱う、という意味である。つまり、 [ax, ay]T は「縦に並んだ ax, ay」を表す。
たとえば、右向きなら [1, 0]T、上向きなら [0, 1]T、右上がりなら [1, 1]T の方向である。
この式は「ベクトル a の長さが1である」という意味である。たとえば、a = [1/√2, 1/√2]T なら、右上45度方向を向いた長さ1のベクトルである。
5.2 データを新しい軸に投影する
ある点 [x, y] を、方向 a の軸に投影する。投影とは、点からその軸へ垂線を下ろし、軸上のどの位置に来るかを見ることである。
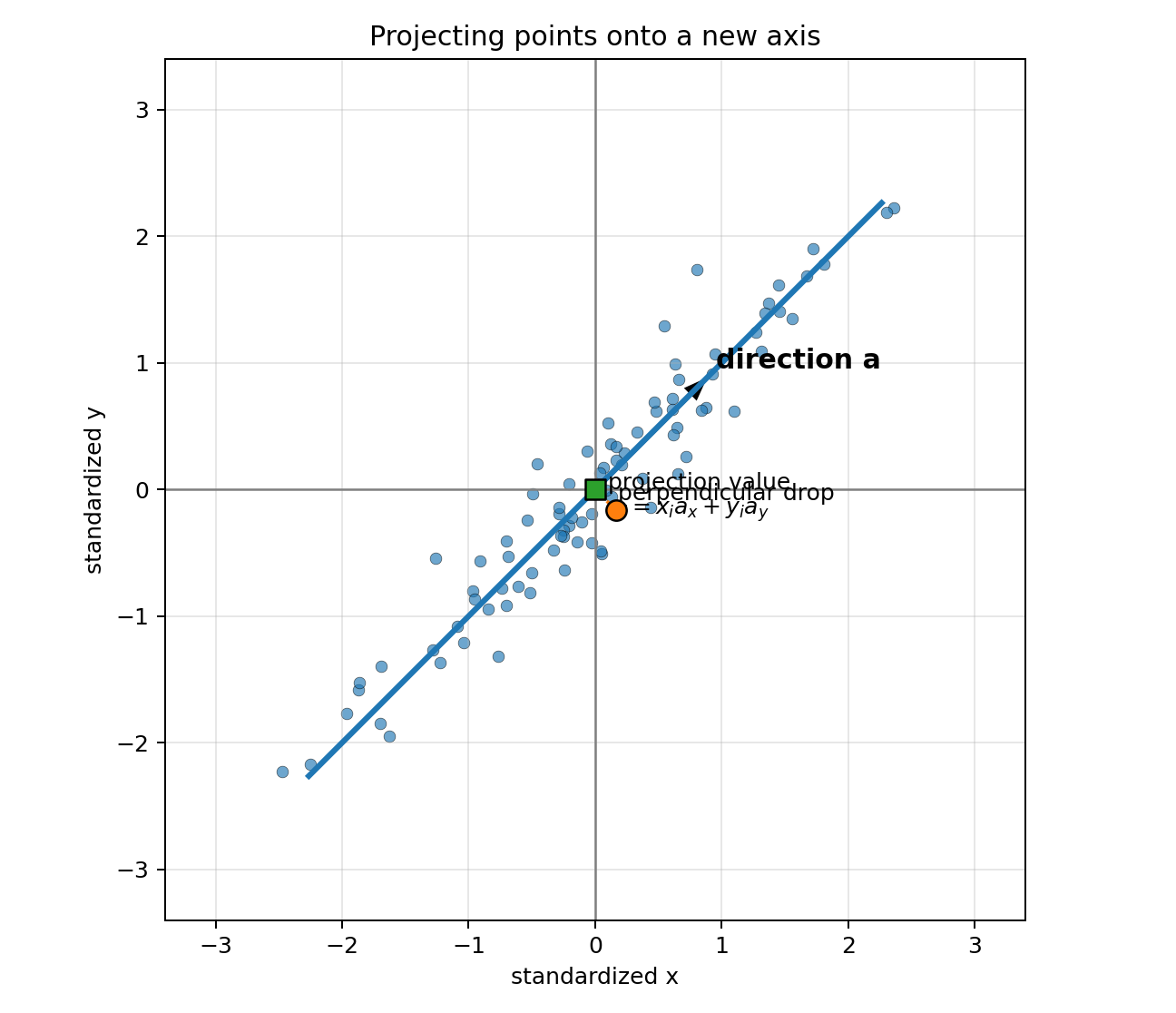
投影値は、内積で表せる。
この式は、点 [x, y] が、軸 a の方向にどれだけ進んでいるかを表す。全データ点についてまとめて書くと、
となる。ここで p は、各データ点を新しい軸に投影した値を並べたベクトルである。PCAが探しているのは、この p の分散が最大になる方向 a である。
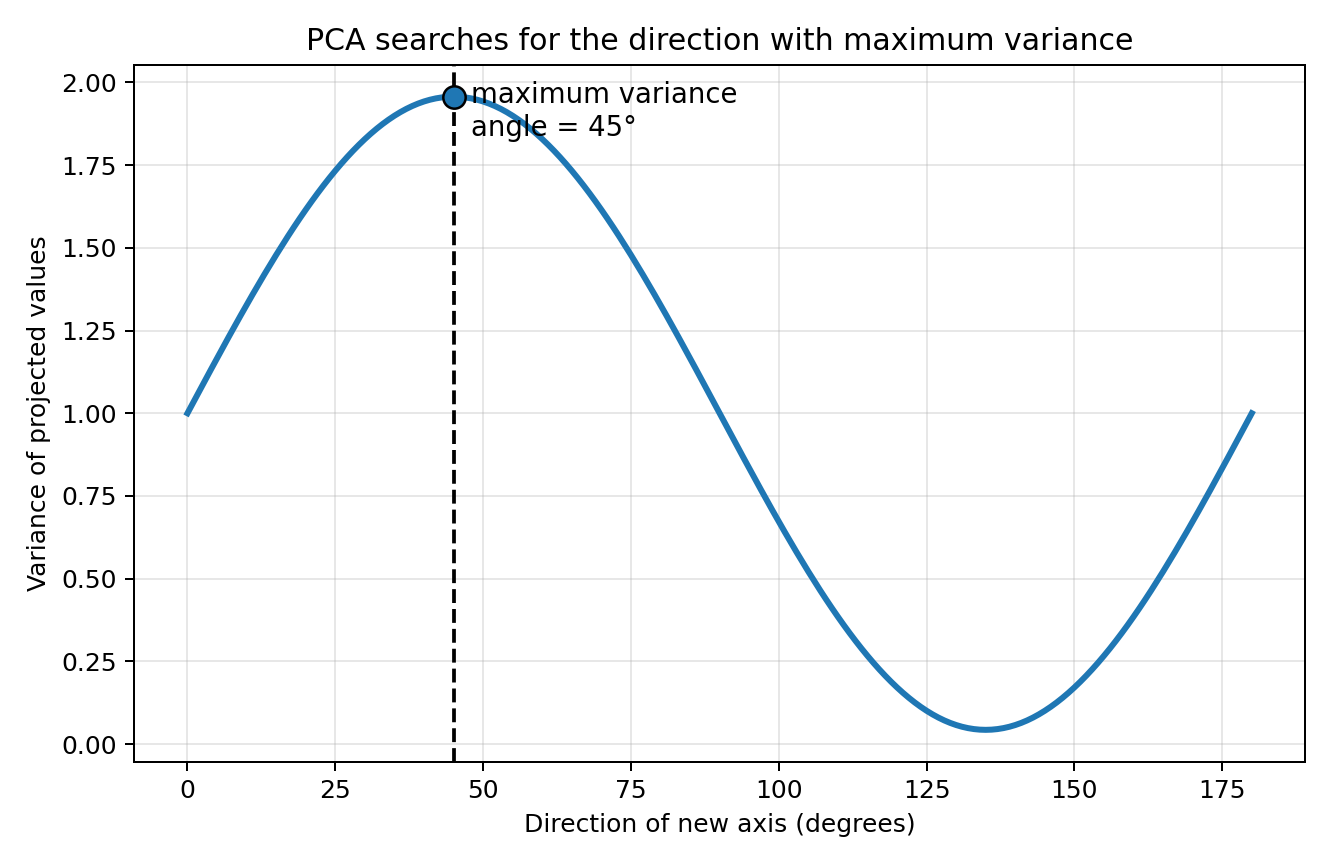
5.3 軸を回すと、投影値の分散が変わる
軸の向きを変えると、投影値 p の分散も変わる。点群が細長く伸びている方向に軸を取ると、投影値は大きく広がる。逆に、点群の短い方向に軸を取ると、投影値の広がりは小さくなる。
5.4 投影後の分散を式で書く
ここから、上の直感を数式で書く。平均を引いたデータ行列を X とし、サンプル数を n とする。投影値は、
である。平均を引いたデータを使っているので、投影値 p の平均も0と考えられる。このとき、投影値の分散は次のように書ける。
ここでまた転置 T が出てくる。p は縦ベクトルなので、pTp は、各投影値の2乗和を表す。
次に、p = Xa を代入する。
行列の転置には、(Xa)T = aTXT という性質がある。したがって、
ここで、平均除去済みデータの共分散行列 C は、
である。したがって、投影後の分散は、
と書ける。
aTC a は、突然出てきた式ではない。p = Xa として投影値を作り、その分散を計算すると、この形になる。
つまり、PCAで解きたい問題は次の形になる。
この式の意味は、長さ1のいろいろな方向 a を試し、その方向に投影したときの分散が最も大きくなる方向を探す、ということである。
5.5 ラグランジュの未定乗数法とは何をする方法か
ここで問題になるのは、aTC a を大きくしたい一方で、aTa = 1 という条件を守らなければならない、という点である。
このように、ある条件を守りながら、ある量を最大または最小にする問題を、制約付き最大化問題という。このような問題を解くための標準的な道具が、ラグランジュの未定乗数法である。
ラグランジュの未定乗数法は、「本来最大にしたい量」と「守らなければならない条件」を1つの式にまとめる方法である。ここでは、最大にしたい量は aTC a、守るべき条件は aTa = 1 である。
そこで、次の関数を作る。
| 記号 | 意味 |
|---|---|
| L | 最大化したい量と制約条件をまとめた関数 |
| aTC a | 方向 a に投影したデータの分散。これを大きくしたい |
| aTa − 1 | ベクトル a の長さを1にする条件 |
| λ | ラグランジュ乗数。条件を式の中に入れるための係数 |
L は「2次方程式」ではない。L = 0 を解いているわけでもない。 L は、最大化したい分散 aTC a と、守るべき条件 aTa = 1 を1つにまとめたラグランジュ関数である。
L を展開して書くと、次のようになる。
未知数は、軸の向きを表す a と、条件を式の中に入れるための λ である。2変数の場合なら、実際には ax, ay, λ を未知数として扱っている。
なぜ偏微分して0とおくのか
最大値または最小値の場所では、未知数をほんの少し動かしても値はそれ以上増えない、または減らない。1変数の関数でいえば、山の頂上や谷の底では接線の傾きが0になる。多変数の場合は、それぞれの未知数について偏微分し、0とおく。
偏微分して0とおくことは、「最大そのものを直接決める」ことではない。 最大・最小になりうる候補を探している。PCAでは、その候補が固有ベクトルとして現れる。
a で偏微分する
まず、L を a で偏微分する。このとき、λ は一時的に定数として扱う。
最後の +λ は a を含まないので、a で微分すると0になる。ここでは、共分散行列 C が対称行列であることも使っている。
ここで初めて、固有値問題が現れる。
λ で偏微分する
次に、L を λ で偏微分する。このときは、a を定数として扱う。
つまり、a で偏微分すると Ca = λa が出て、λ で偏微分すると、もともとの制約条件 aTa = 1 が戻ってくる。
5.6 固有値・固有ベクトルの意味
式 Ca = λa を満たす特別な方向 a を固有ベクトル、その係数 λ を固有値という。
| 記号 | 意味 |
|---|---|
| C | 共分散行列。データのばらつき方を表す |
| a | 固有ベクトル。PCAではPC軸の向き、EOF解析ではEOFパターンに対応する |
| λ | 固有値。その軸方向の分散の大きさを表す |
未定乗数法で出るのは最大だけではない
ここで注意が必要である。ラグランジュの未定乗数法で得られる Ca = λa は、「分散が最大になる方向」だけを直接出しているわけではない。この式から出てくる固有ベクトルは、分散が最大または最小になりうる候補である。
では、その候補の中でどれが最大なのかは、どう判断するのだろうか。a の長さを1にしているので、Ca = λa の左から aT をかけると、
左辺 aTCa は「方向 a に投影した分散」である。したがって、固有値 λ は、その固有ベクトル方向に投影したときの分散そのものである。
固有値 = その軸方向の分散そのもの
したがって、未定乗数法で得られた候補のうち、最も大きい固有値に対応する固有ベクトルが、分散最大の方向、すなわち PC1 である。一方、最も小さい固有値に対応する固有ベクトルは、分散最小の方向である。
最も大きな固有値に対応する固有ベクトルが PC1 の方向であり、次に大きな固有値に対応する固有ベクトルが PC2 の方向である。
5.7 固有値を求めるために特性方程式へ進む
では、固有値 λ はどうやって求めるのだろうか。固有値問題は、
である。右辺の λa は、単位行列 I を使って λIa と書けるので、
ここで a = 0 は意味がない。なぜなら、固有ベクトルは「方向」を表すものであり、ゼロベクトルには方向がないからである。
したがって、a ≠ 0 となる解が存在する必要がある。そのためには、行列 C − λI が逆行列を持たない必要がある。逆行列を持たない行列は、行列式が0になる。
この式を特性方程式という。特性方程式を解くことで、固有値 λ が求まる。
5.8 2変数の場合の式展開
2変数の場合、共分散行列を次のように書く。
このとき、
2×2行列の行列式を一度確認する
ここで使っているのは、2×2行列の行列式の計算である。一般に、2×2行列
の行列式は、次のように計算する。
つまり、左上×右下 − 右上×左下である。今回の行列 C − λI を、この一般形 A と対応させると、次のようになる。
| 一般形の成分 | 今回の C − λI の成分 |
|---|---|
| a(左上) | cxx − λ |
| b(右上) | cxy |
| c(左下) | cxy |
| d(右下) | cyy − λ |
したがって、det(C − λI) は次のように計算できる。
固有値を求めるためには、この行列式が0になる条件を使う。したがって、特性方程式は次のようになる。
これを展開すると、
これは λ についての2次方程式である。2次元データでは、この方程式から固有値が2つ出る。
5.9 数値例で確認する
標準化した2変数データで、x と y が強く正に相関している場合を考える。標準化後なので、x と y の分散はどちらも 1 とし、共分散を 0.8 とする。
このとき、特性方程式は、
したがって、固有値は次の2つになる。
大きい固有値 λ1 = 1.8 に対応する方向が PC1 である。小さい固有値 λ2 = 0.2 に対応する方向が PC2 である。
5.10 固有ベクトルを求める
次に、λ1 = 1.8 に対応する固有ベクトルを求める。固有ベクトルは、
を満たす。実際に代入すると、
1行目を見ると、
したがって、PC1 の方向は [1, 1] 方向である。長さが1になるように正規化すると、
これは、x と y が同時に増える右上がり方向である。散布図が右上がりに細長く伸びるとき、PC1 がその長軸方向を向く理由はここにある。
同様に、λ2 = 0.2 を代入すると、ax = −ay となる。したがって、PC2 の方向は [1, −1] 方向である。
5.11 Pythonで確認する
上の計算は、Pythonでは次のように確認できる。
import numpy as np
C = np.array([
[1.0, 0.8],
[0.8, 1.0]
])
eigvals, eigvecs = np.linalg.eigh(C)
# 固有値を大きい順に並べ替える
idx = np.argsort(eigvals)[::-1]
eigvals = eigvals[idx]
eigvecs = eigvecs[:, idx]
print("固有値")
print(eigvals)
print("固有ベクトル")
print(eigvecs)実行すると、固有値はおおよそ次のようになる。
固有値
[1.8 0.2]固有ベクトルは、おおよそ次のようになる。
固有ベクトル
[[ 0.707 0.707]
[ 0.707 -0.707]]ただし、固有ベクトルの符号は反転することがある。たとえば [0.707, 0.707] と [-0.707, -0.707] は、矢印の向きが逆なだけで、同じ軸を表している。
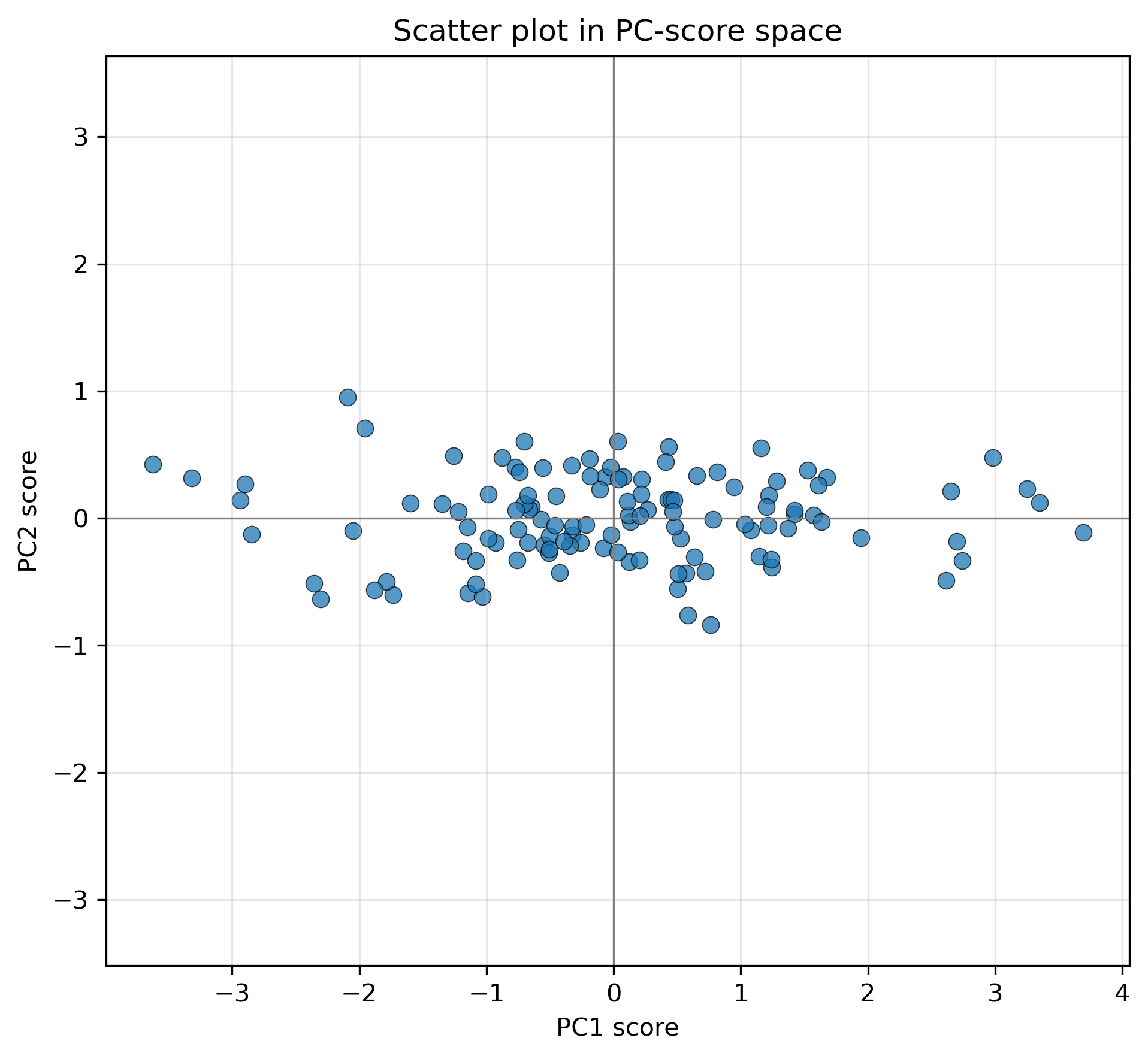
6. PCスコアと寄与率
PC軸が求まったら、各データ点をその軸に投影する。この投影された値が PCスコア である。
ここで A は、固有ベクトルを列に並べた行列である。PC1スコアは、各点がPC1方向にどの位置にあるかを表す。PC2スコアは、PC2方向にどの位置にあるかを表す。
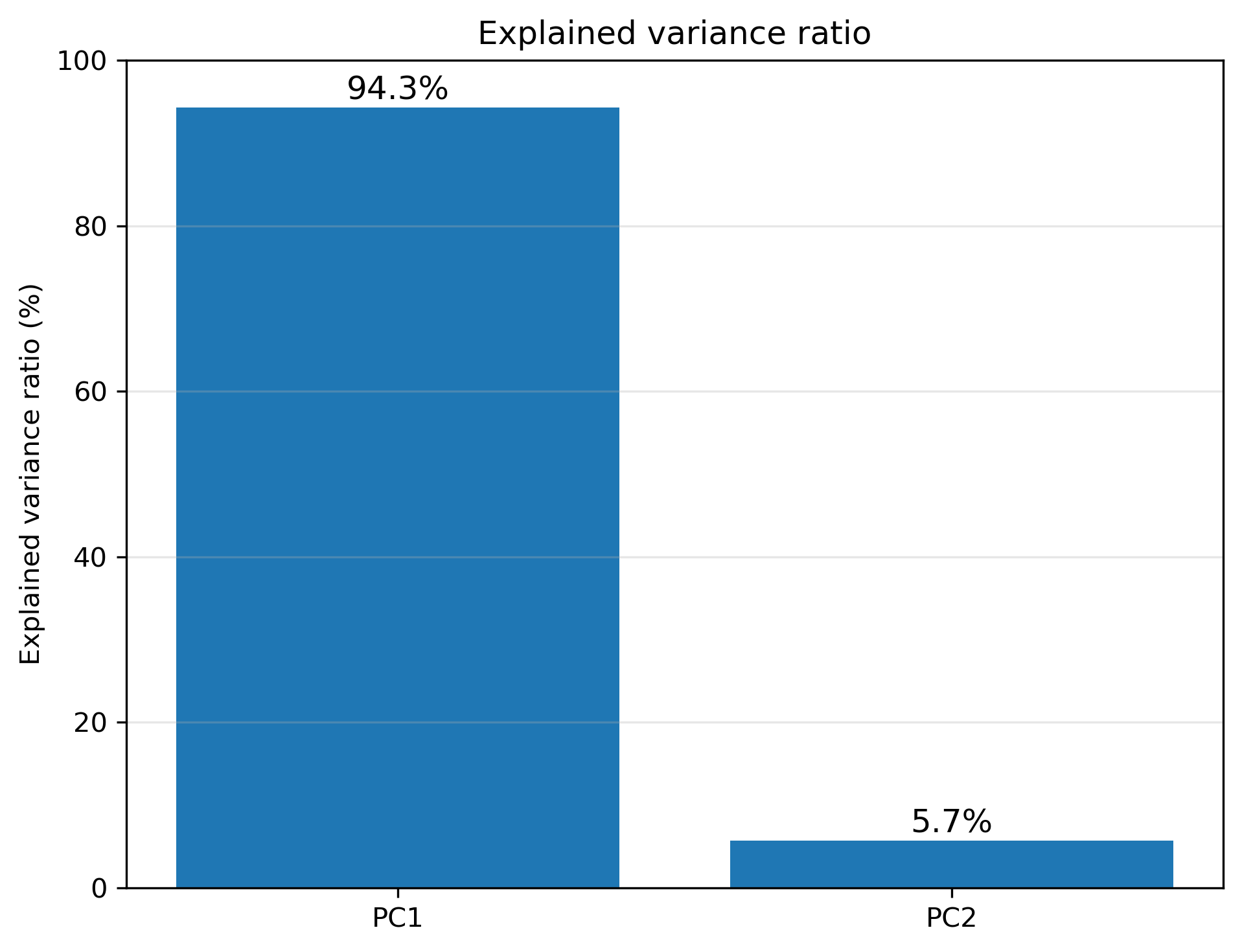
寄与率は、各PCが全体のばらつきをどれだけ説明しているかを表す。
たとえば PC1 の寄与率が 94% なら、データのばらつきのほとんどは PC1 の方向で説明できる。
7. 何モードまで出せるか、どこまで信頼できるか
今回の例では変数が x と y の2つだけなので、出せるモードは最大で2つである。つまり、PC1 と PC2 までで終わる。
| データの形 | 出せるモード数の上限 |
|---|---|
| 今回のように変数が2つ | 最大2モード |
| 変数が m 個 | 最大 m モード |
| サンプル数が N の場合 | 最大でも N−1 モードまで |
一般には、出せるモード数の上限は 変数の数 と サンプル数−1 の小さい方で決まる。
寄与率が近いモードは区別できるのか
EOF解析では、固有値が大きい順にモードを並べる。しかし、隣り合う固有値が非常に近い場合、その2つのモードは統計的に明確に分離できないことがある。
この目安としてよく使われるのが North の rule of thumb である。固有値 λ のサンプリング誤差は、おおまかに次で見積もられる。
ここで N_eff は有効サンプル数である。時系列に自己相関がある場合、単純なデータ数 N より小さくなる。
隣り合う固有値の差がこの誤差幅と同程度以下なら、その2つのモードは入れ替わったり混ざったりしやすい。つまり、モードの解釈には注意が必要である。
8. 作成される図の例
7.1 元データの散布図
7.2 PCA軸とPCスコア
7.3 寄与率
9. 穴埋めポイント
以下の空欄 ____ を埋めながら、EOF/PCAの計算手順を確認する。
STEP 1:2次元データを作る
np.random.seed(____)
n = ____
x = np.random.normal(loc=0.0, scale=1.0, size=n)
noise = np.random.normal(loc=0.0, scale=0.7, size=n)
y = ____ * x + noise
X = np.column_stack([____, ____])STEP 2:標準化する
X_mean = X.mean(axis=____)
X_std = X.std(axis=____, ddof=1)
X_stdzd = (X - ____) / ____STEP 3:共分散行列を作る
C = np.cov(X_stdzd, rowvar=____)STEP 4:固有値・固有ベクトルを求める
eigvals, eigvecs = np.linalg.eigh(____)
idx = np.argsort(eigvals)[____]
eigvals = eigvals[idx]
eigvecs = eigvecs[:, idx]STEP 5:PCスコアと寄与率を計算する
scores = X_stdzd @ ____
explained_ratio = eigvals / eigvals.____()10. 穴埋め版スクリプト
以下を Jupyter Lab のセルにそのまま貼り付け、____ を埋めてから実行する。今回は図の保存は行わず、Jupyter上に表示するだけである。
# ============================================================
# 15. EOF初級編:2次元データで理解するPCA/EOF
# ============================================================
#
# このスクリプトで行うこと
# 1. 2変数 x, y の疑似データを作る
# 2. 標準化する
# 3. 共分散行列を計算する
# 4. 固有値・固有ベクトルを求める
# 5. EOF軸、PCスコア、寄与率を可視化する
#
# 図は保存せず、表示だけ行う。
# ============================================================
import numpy as np
import matplotlib.pyplot as plt
# ============================================================
# 1. 2次元データを作る
# ============================================================
np.random.seed(____) # 例:1
n = ____ # 例:100
x = np.random.normal(loc=0.0, scale=1.0, size=n)
noise = np.random.normal(loc=0.0, scale=0.7, size=n)
y = ____ * x + noise # 例:2.4
# 外れ気味の点を少し加える
x[:8] = x[:8] + np.linspace(-1.5, 2.0, 8)
y[:8] = y[:8] + np.linspace(-3.5, 4.0, 8)
# 行がサンプル、列が変数のデータ行列にする
X = np.column_stack([____, ____]) # x, y
print("Data shape:", X.shape)
print("First 5 rows:")
print(X[:5])
# ============================================================
# 2. 元データの散布図
# ============================================================
plt.figure(figsize=(7, 6))
plt.scatter(x, y, s=70, alpha=0.75, edgecolor="k", linewidth=0.5)
plt.axhline(0, color="0.5", linewidth=1)
plt.axvline(0, color="0.5", linewidth=1)
plt.grid(True, alpha=0.3)
plt.xlabel("Variable 1: x")
plt.ylabel("Variable 2: y")
plt.title("Two-dimensional scatter plot")
plt.xlim(-7.5, 7.5)
plt.ylim(-7.0, 7.0)
plt.show()
# ============================================================
# 3. 標準化
# ============================================================
#
# 各変数から平均を引き、標準偏差で割る。
# 標準化後は、各変数の平均が0、標準偏差が1になる。
# ============================================================
X_mean = X.mean(axis=____) # 0
X_std = X.std(axis=____, ddof=1) # 0
X_stdzd = (X - ____) / ____ # X_mean, X_std
x_std = X_stdzd[:, 0]
y_std = X_stdzd[:, 1]
print("Mean before standardization:", X_mean)
print("Std before standardization :", X_std)
print("Mean after standardization :", X_stdzd.mean(axis=0))
print("Std after standardization :", X_stdzd.std(axis=0, ddof=1))
# ============================================================
# 4. 標準化前後の比較図
# ============================================================
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
axes[0].scatter(x, y, s=55, alpha=0.75, edgecolor="k", linewidth=0.5)
axes[0].axhline(0, color="0.5", linewidth=1)
axes[0].axvline(0, color="0.5", linewidth=1)
axes[0].grid(True, alpha=0.3)
axes[0].set_title("Before standardization")
axes[0].set_xlabel("x")
axes[0].set_ylabel("y")
axes[0].set_xlim(-10, 10)
axes[0].set_ylim(-7, 7)
axes[1].scatter(x_std, y_std, s=55, alpha=0.75, edgecolor="k", linewidth=0.5)
axes[1].axhline(0, color="0.5", linewidth=1)
axes[1].axvline(0, color="0.5", linewidth=1)
axes[1].grid(True, alpha=0.3)
axes[1].set_title("After standardization")
axes[1].set_xlabel("standardized x")
axes[1].set_ylabel("standardized y")
axes[1].set_xlim(-4.5, 4.5)
axes[1].set_ylim(-3.2, 3.2)
fig.suptitle("Effect of standardization", fontsize=18)
plt.tight_layout()
plt.show()
# ============================================================
# 5. 共分散行列を計算する
# ============================================================
#
# rowvar=False とすることで、列を変数として扱う。
# 今回は列が x と y である。
# ============================================================
C = np.cov(X_stdzd, rowvar=____) # False
print("Covariance matrix:")
print(C)
# ============================================================
# 6. 固有値・固有ベクトルを求める
# ============================================================
#
# 固有ベクトル:PC軸、またはEOF軸の方向
# 固有値:その軸方向の分散の大きさ
# 数学的には C a = lambda a を満たす a と lambda を求める
# ============================================================
eigvals, eigvecs = np.linalg.eigh(____) # C
# 固有値を大きい順に並べ替える
idx = np.argsort(eigvals)[____] # ::-1
eigvals = eigvals[idx]
eigvecs = eigvecs[:, idx]
print("Eigenvalues:")
print(eigvals)
print("Eigenvectors:")
print(eigvecs)
# ============================================================
# 7. 寄与率を計算する
# ============================================================
explained_ratio = eigvals / eigvals.____() # sum
print("Explained variance ratio:")
print(explained_ratio)
print("Explained variance ratio (%):")
print(explained_ratio * 100)
# ============================================================
# 8. 標準化データ上にPCA軸を描く
# ============================================================
pc1 = eigvecs[:, 0]
pc2 = eigvecs[:, 1]
scale1 = 2.5 * np.sqrt(eigvals[0])
scale2 = 2.5 * np.sqrt(eigvals[1])
plt.figure(figsize=(8, 7))
plt.scatter(x_std, y_std, s=70, alpha=0.75, edgecolor="k", linewidth=0.5)
plt.axhline(0, color="0.5", linewidth=1)
plt.axvline(0, color="0.5", linewidth=1)
# PC1軸
plt.arrow(
0, 0,
pc1[0] * scale1,
pc1[1] * scale1,
head_width=0.12,
head_length=0.18,
linewidth=3,
length_includes_head=True,
color="black"
)
# PC2軸
plt.arrow(
0, 0,
pc2[0] * scale2,
pc2[1] * scale2,
head_width=0.12,
head_length=0.18,
linewidth=3,
length_includes_head=True,
color="black"
)
plt.text(pc1[0] * scale1 * 1.05, pc1[1] * scale1 * 1.05, "PC1", fontsize=18, weight="bold")
plt.text(pc2[0] * scale2 * 1.15, pc2[1] * scale2 * 1.15, "PC2", fontsize=18, weight="bold")
plt.grid(True, alpha=0.3)
plt.xlabel("Standardized x")
plt.ylabel("Standardized y")
plt.title("PCA axes on standardized data")
plt.xlim(-3.2, 3.5)
plt.ylim(-3.1, 3.0)
plt.show()
# ============================================================
# 9. PCスコアを計算する
# ============================================================
#
# PCスコアとは、各データ点をEOF軸に射影した値である。
# scores[:,0] が PC1スコア
# scores[:,1] が PC2スコア
# ============================================================
scores = X_stdzd @ ____ # eigvecs
pc1_score = scores[:, 0]
pc2_score = scores[:, 1]
print("PC score shape:", scores.shape)
print("First 5 PC scores:")
print(scores[:5])
# ============================================================
# 10. PCスコア空間の散布図
# ============================================================
plt.figure(figsize=(8, 7))
plt.scatter(pc1_score, pc2_score, s=70, alpha=0.75, edgecolor="k", linewidth=0.5)
plt.axhline(0, color="0.5", linewidth=1)
plt.axvline(0, color="0.5", linewidth=1)
plt.grid(True, alpha=0.3)
plt.xlabel("PC1 score")
plt.ylabel("PC2 score")
plt.title("Scatter plot in PC-score space")
plt.xlim(-4.0, 4.2)
plt.ylim(-3.5, 3.5)
plt.show()
# ============================================================
# 11. 寄与率を棒グラフで表示
# ============================================================
plt.figure(figsize=(8, 6))
labels = ["PC1", "PC2"]
values = explained_ratio * 100
plt.bar(labels, values)
for i, v in enumerate(values):
plt.text(i, v + 1.0, f"{v:.1f}%", ha="center", fontsize=16)
plt.ylim(0, 100)
plt.ylabel("Explained variance ratio (%)")
plt.title("Explained variance ratio")
plt.grid(axis="y", alpha=0.3)
plt.show()
# ============================================================
# 12. 結果のまとめ
# ============================================================
print("============================================================")
print("Summary")
print("============================================================")
print(f"PC1 explained variance ratio: {explained_ratio[0]*100:.1f}%")
print(f"PC2 explained variance ratio: {explained_ratio[1]*100:.1f}%")
print("")
print("PC1 direction vector:", pc1)
print("PC2 direction vector:", pc2)
11. 結果の見方
- 散布図が斜め方向に細長い場合、PC1 はその長軸方向を向く。
- PC2 は PC1 と直交し、残りのばらつきを表す。
- PC1 の寄与率が高い場合、2変数のばらつきの多くは1本の軸で説明できる。
- PCスコアは、各データ点を新しいPC軸に投影した座標である。
- なぜ標準化する必要があるのか。
- PC1の向きは、元の散布図のどの方向に対応しているか。
- PC1の寄与率が高いとは、何を意味しているか。
- PCスコア空間では、元の散布図と何が変わっているか。
- 寄与率が近い2つのモードは、常に別々に解釈してよいか。
- North の rule of thumb では、どのようなときにモード分離が難しいと考えるか。
12. まとめ
- EOF/PCAは、データのばらつきが最大となる方向を求める方法である。
- 標準化により、変数の単位やスケールの違いをそろえることができる。
- 共分散行列の固有ベクトルがPC軸またはEOF軸、固有値がその軸方向の分散を表す。
- PCスコアは、各データ点をEOF軸に射影した値である。
- 寄与率は、各PCが全体のばらつきをどれだけ説明するかを表す。
- 出せるモード数は、変数の数とサンプル数によって制限される。
- 隣り合う固有値が近い場合、North の rule of thumb によりモード分離の信頼性を考える必要がある。