|
|
 |
|
|
当研究室では,環境を保全しながら海洋とその資源を持続的に有効利用するための,工学的技術に関する研究を行っています.主に制御工学を基礎として,海洋や水産関連分野において用いられる機械・ロボットの制御技術を中心に研究しています.具体的には,非線形ロバスト制御とその海洋・水産機械分野への応用,波浪による動揺が存在する環境下でのロボットマニピュレータ(クレーン)の運動制御,水中作業用ロボットの運動制御などが挙げられます.
また,システム制御の理論に加え,関連する数学・物理学・コンピュータプログラミングの基礎といった内容についての教育も行っています.それらを通じて,日常生活の中でも,また市民としても,「科学的に考え,行動する」ことの大切さを実感してほしいと考えています.また,「正しい知識を得ることで,より豊かな考える力を身につけられる」ことを伝えられる教育を目指しています.
【研究テーマ】
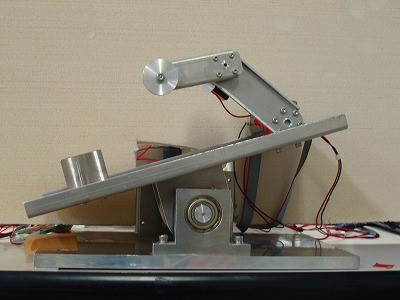
「波浪で動揺するプラットホーム上のロボットマニピュレータの制御」
「水中曳航体の運動制御」
「柔軟構造を有する機械システムのための統一的制御手法」
「ロボットなど非線形システムのロバスト安定性解析」
|
|
|

|
|






