MODIS SST4 と AMSR2/GHRSST SST の簡易合成
赤外センサーによる高解像度 SST と、マイクロ波放射計による雲に強い SST を組み合わせ、 黒潮域の SST gap filling を試みます。この解析の目的は、きれいな図を作ることではなく、 異なる衛星 SST を合成するときに何を確認しなければならないかを理解することです。
この解析の中心的な問い
この問いを、観測点、再格子化、バイアス、RMSE、source flag、前線構造の観点から検討します。
データと前提
| データ | 役割 | 注意点 |
|---|---|---|
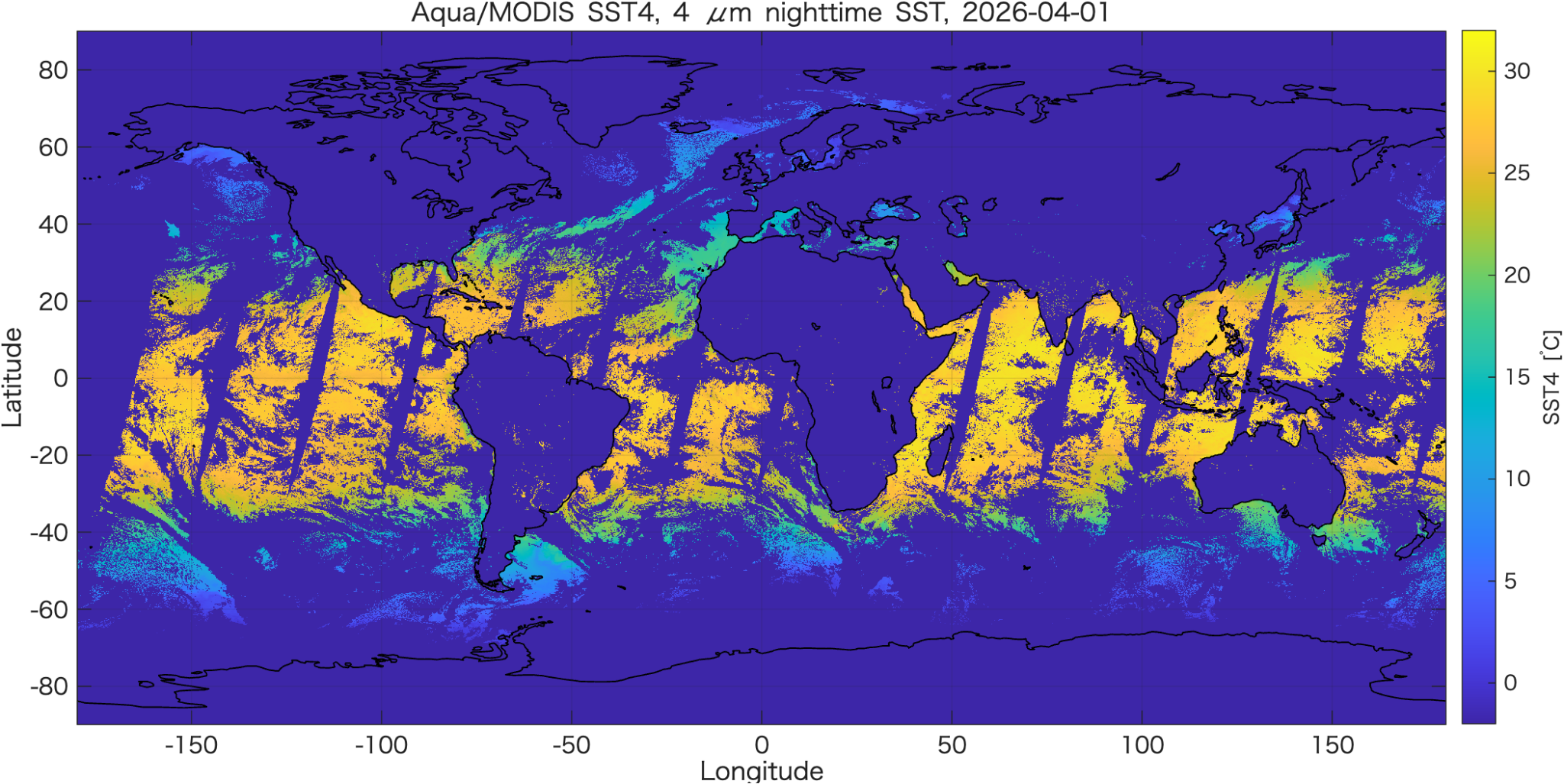
| Aqua/MODIS L3 mapped SST4 | 高解像度の赤外 SST。黒潮前線などの細かい構造を表現しやすい。 | 雲で欠損する。ファイル名の DAY は daily product の意味であり、SST4 は 4 µm nighttime SST として扱う。 |
| AMSR2/REMSS/GHRSST L2P subskin SST | 雲に強いマイクロ波 SST。MODIS 欠損域の一部を補完する候補。 | L2P swath なので、最初から格子化された画像ではない。単位は K なので ℃ に変換する。 |
| 対象日・海域 | 2026年4月1日、黒潮域(120–160°E, 20–45°N) | 同日内の複数パスを用いるため、厳密な同時刻合成ではない。 |
解析フロー
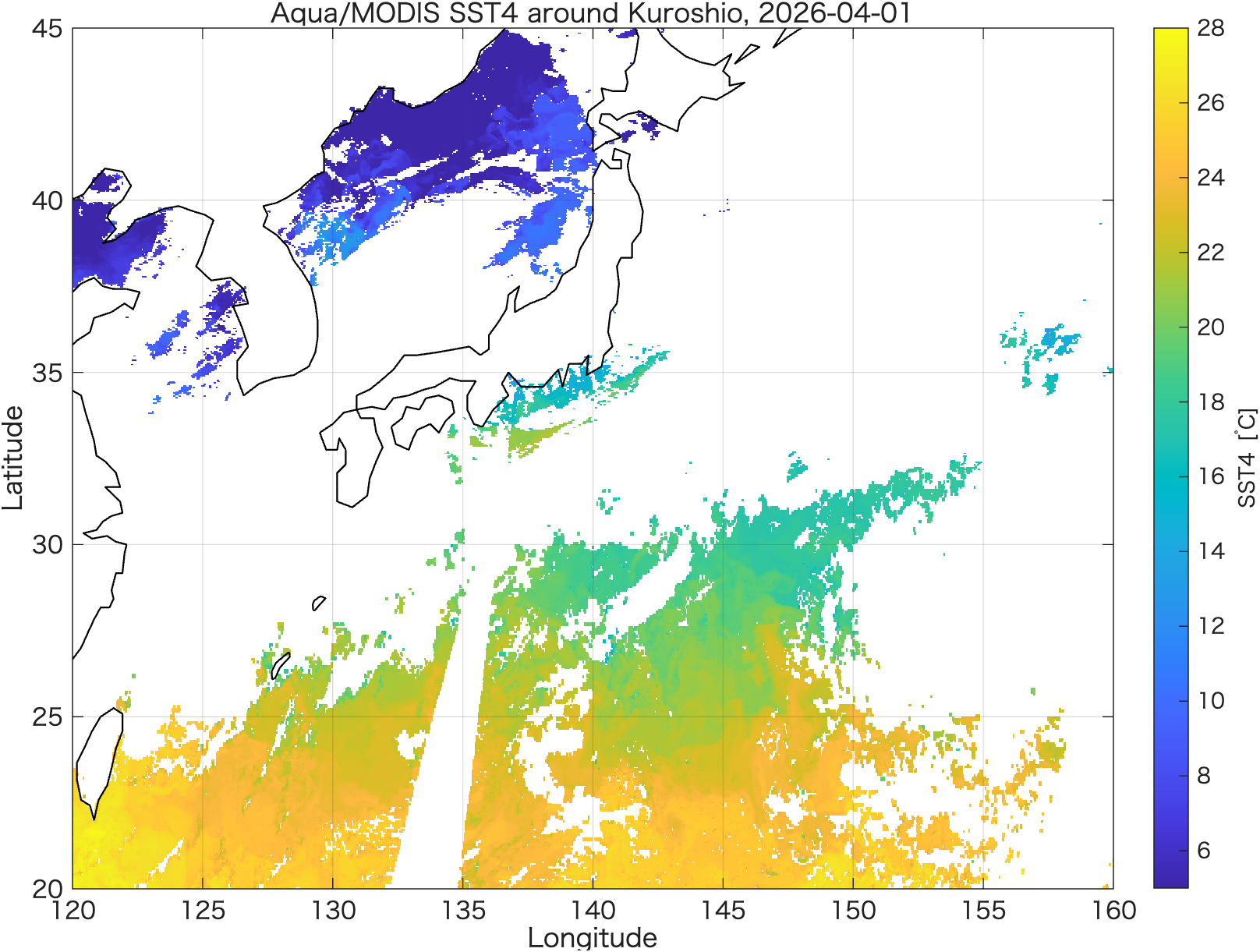
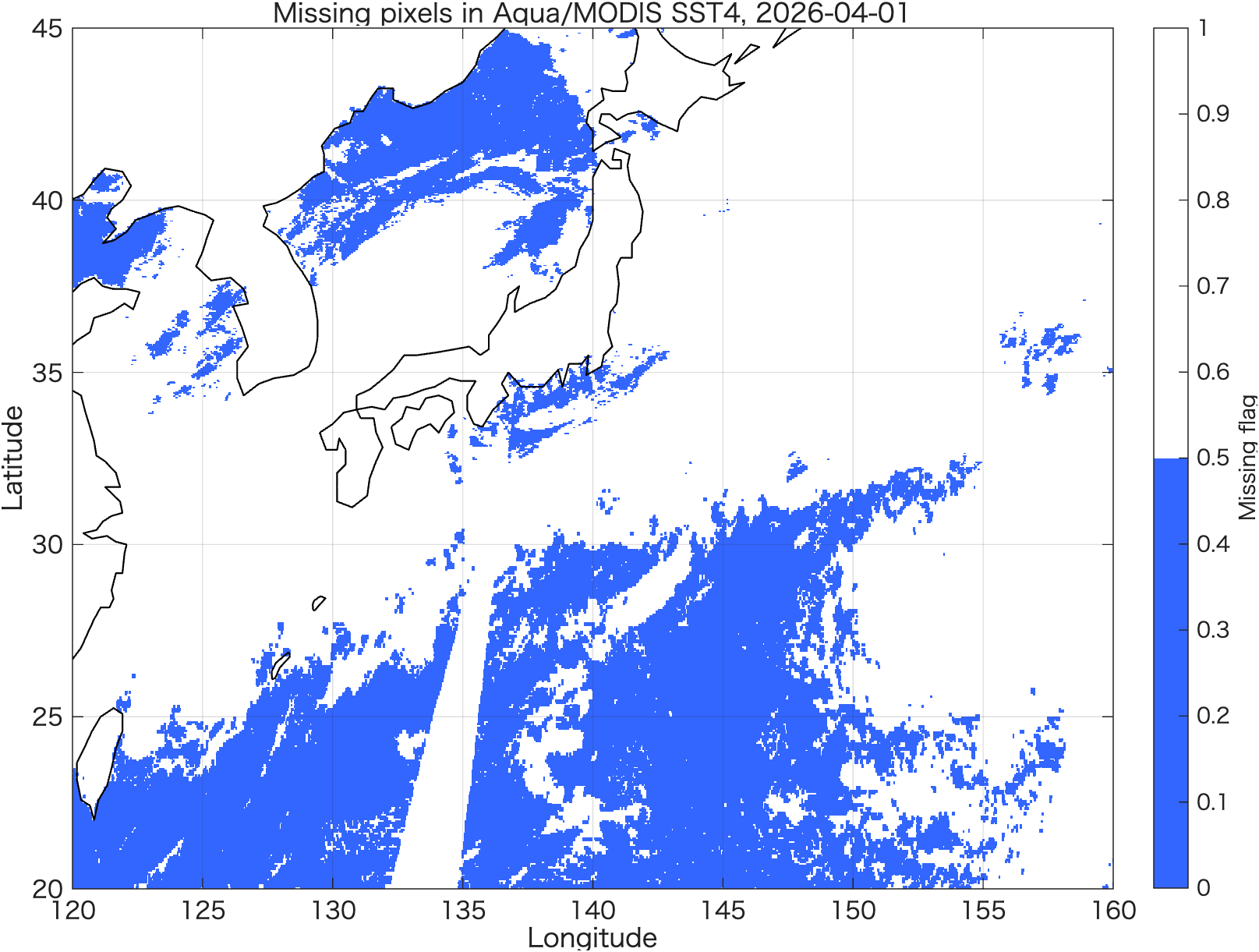
MODIS SST4 を読み込み、欠損を確認する
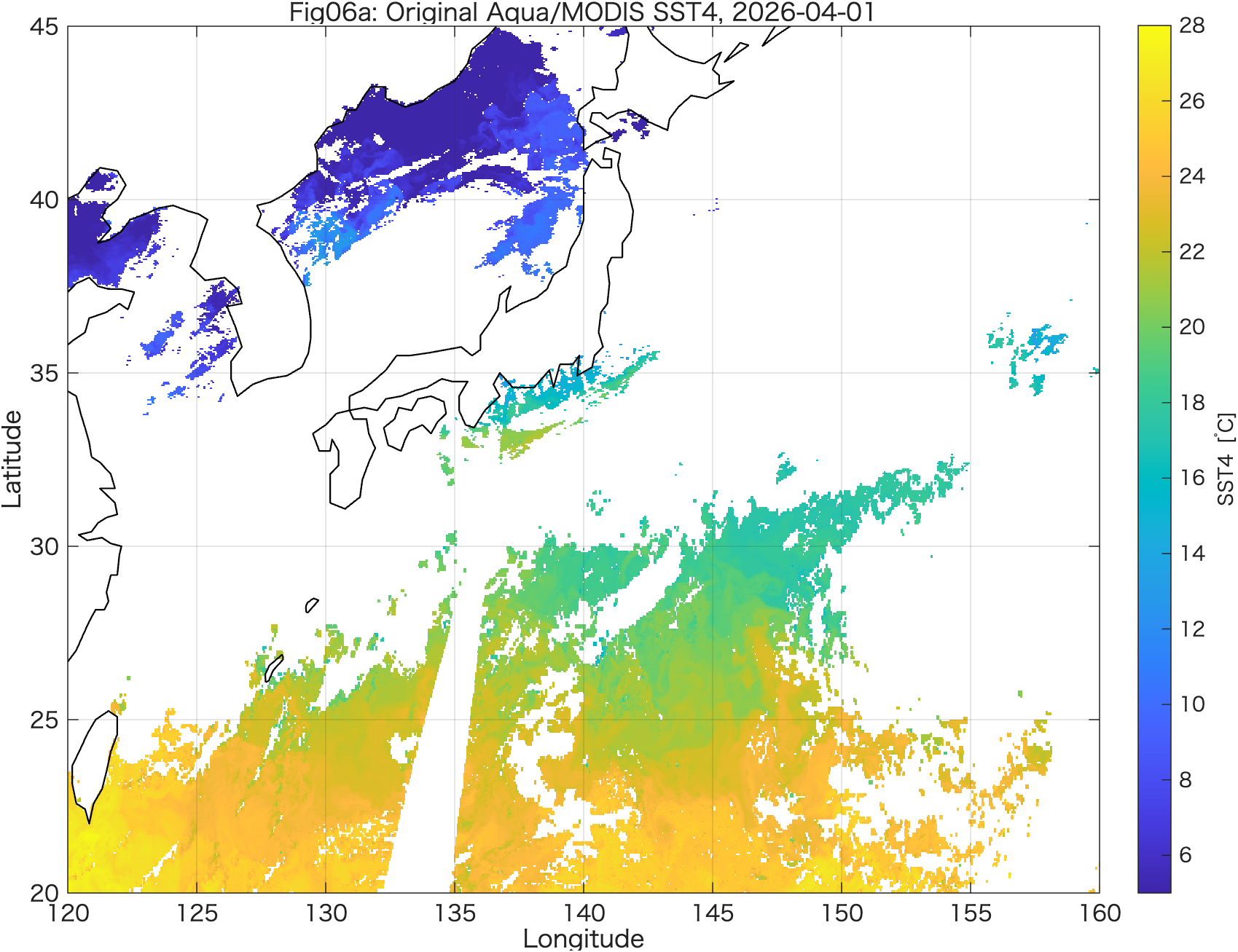
最初に Aqua/MODIS の L3 mapped SST4 を読み込みます。MODIS は高解像度で黒潮前線を見やすい一方、 雲による欠損が大きいことが分かります。欠損は単なる空白ではなく、後の解析結果にバイアスを与えうるため、 gap filling の前に必ず確認します。
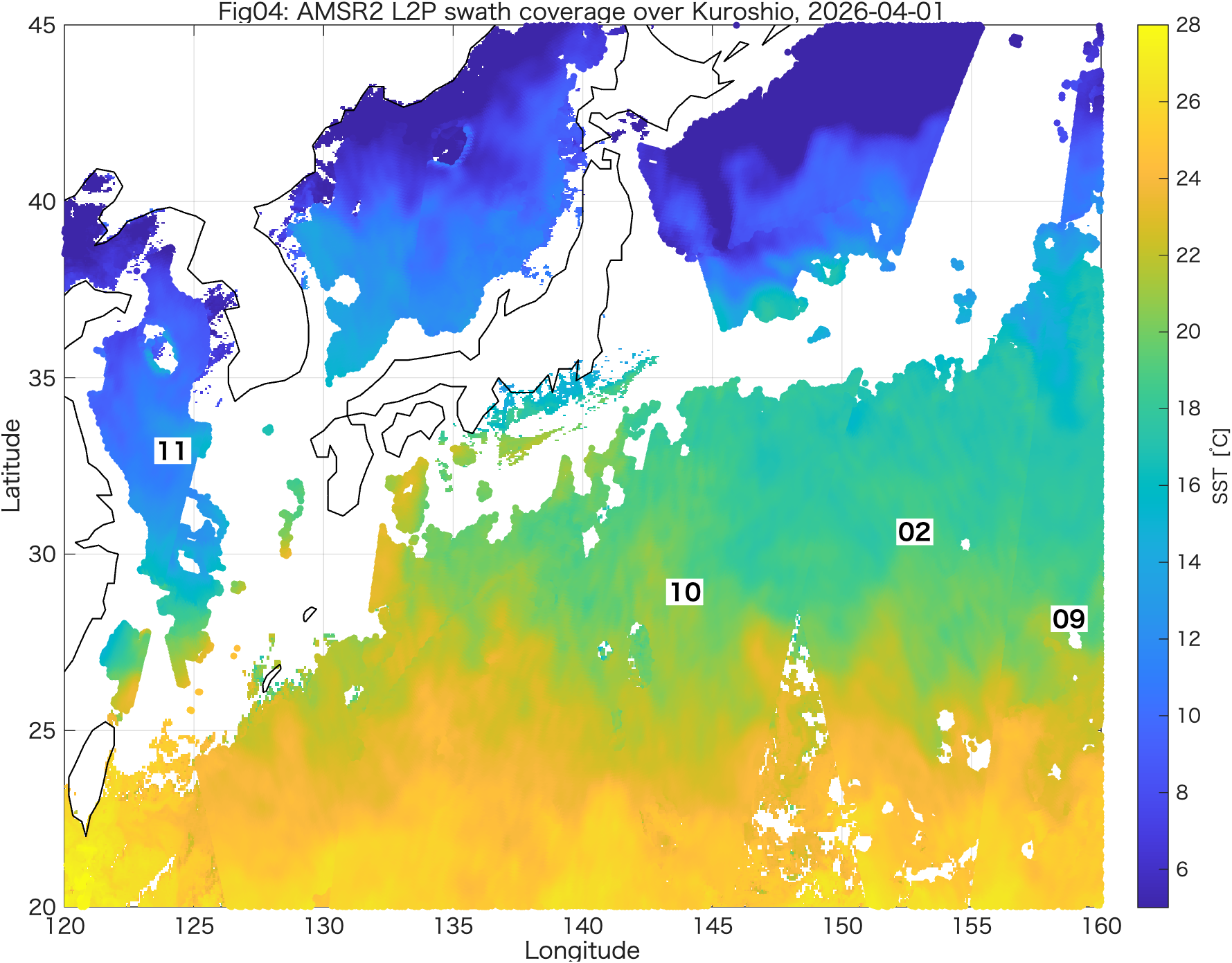
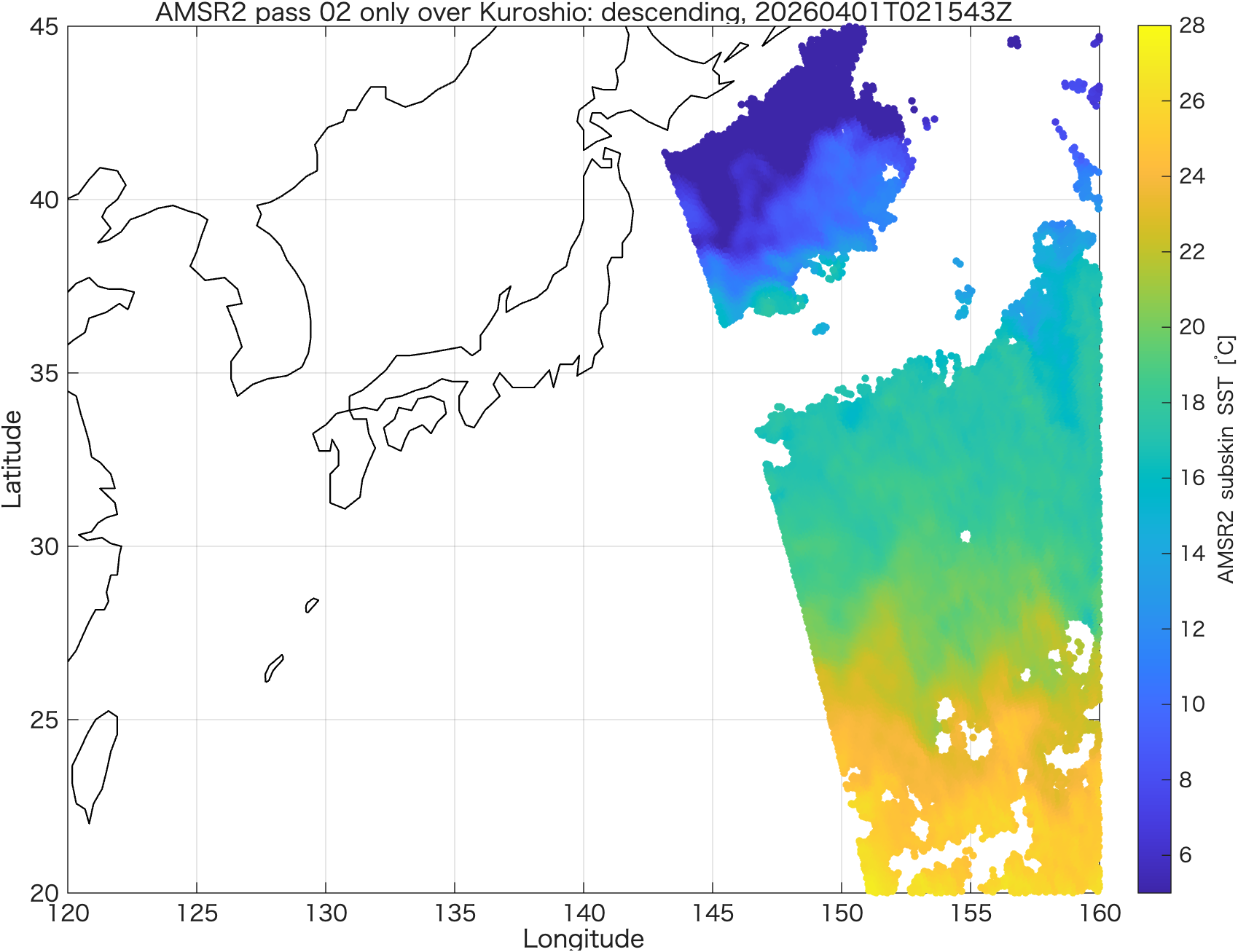
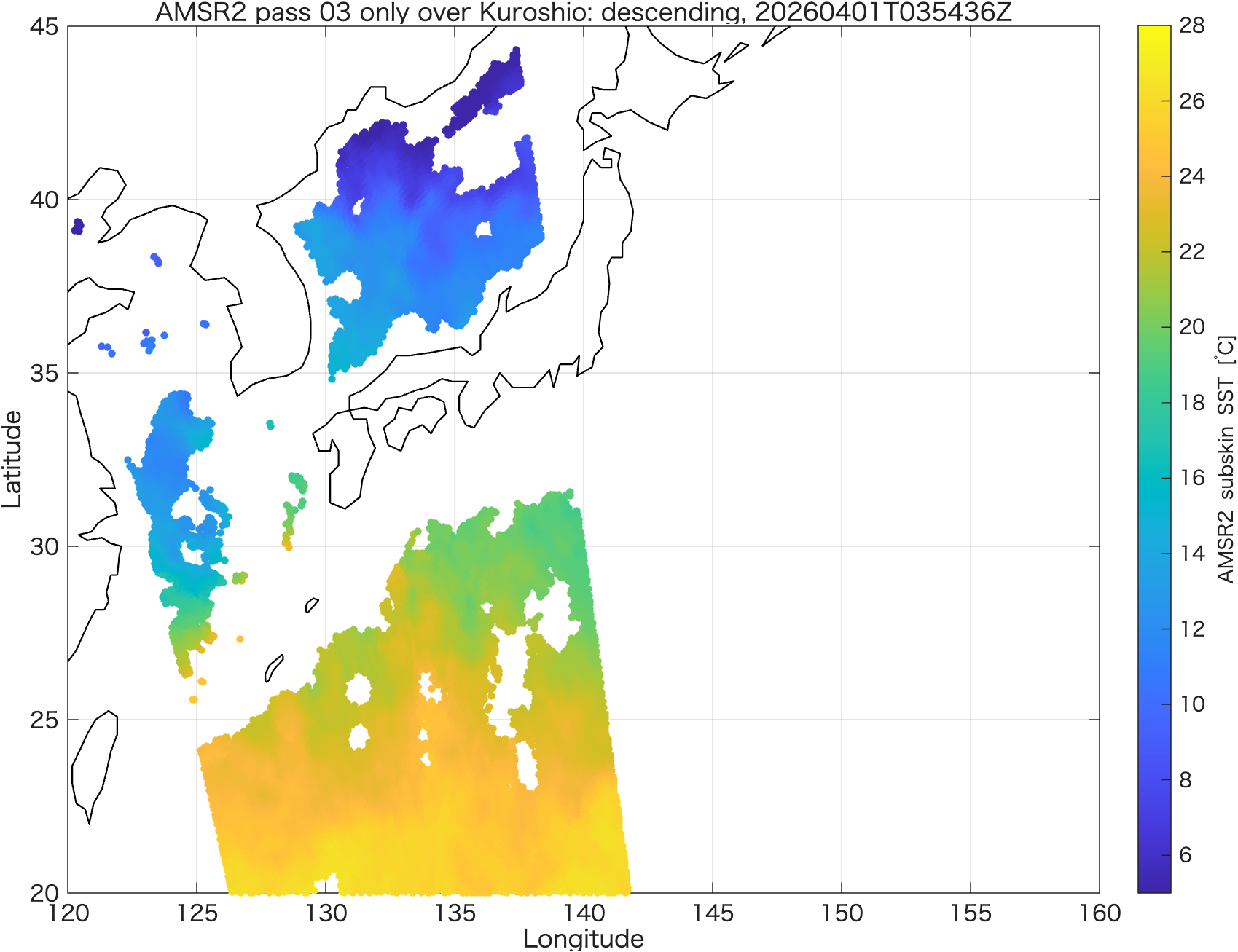
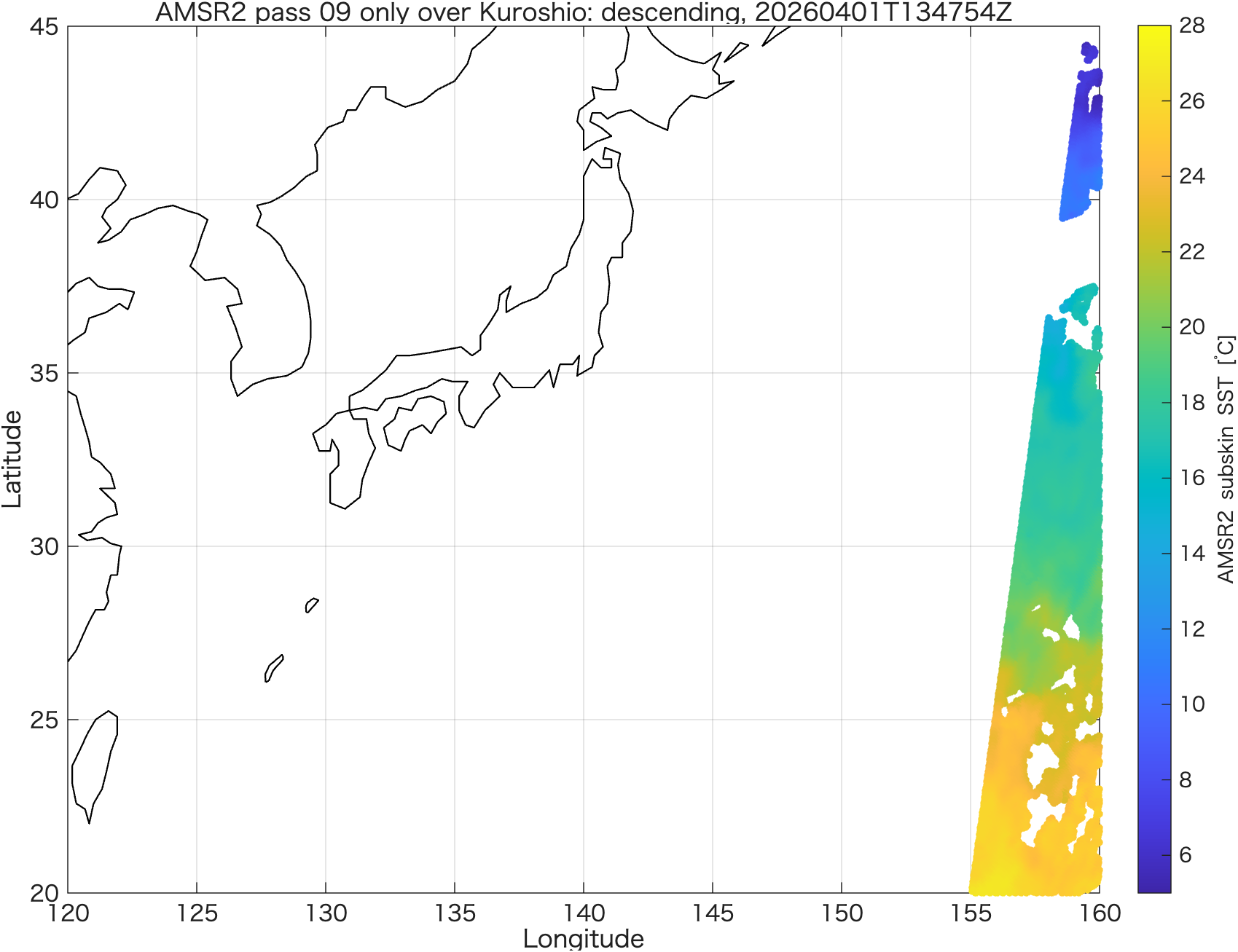
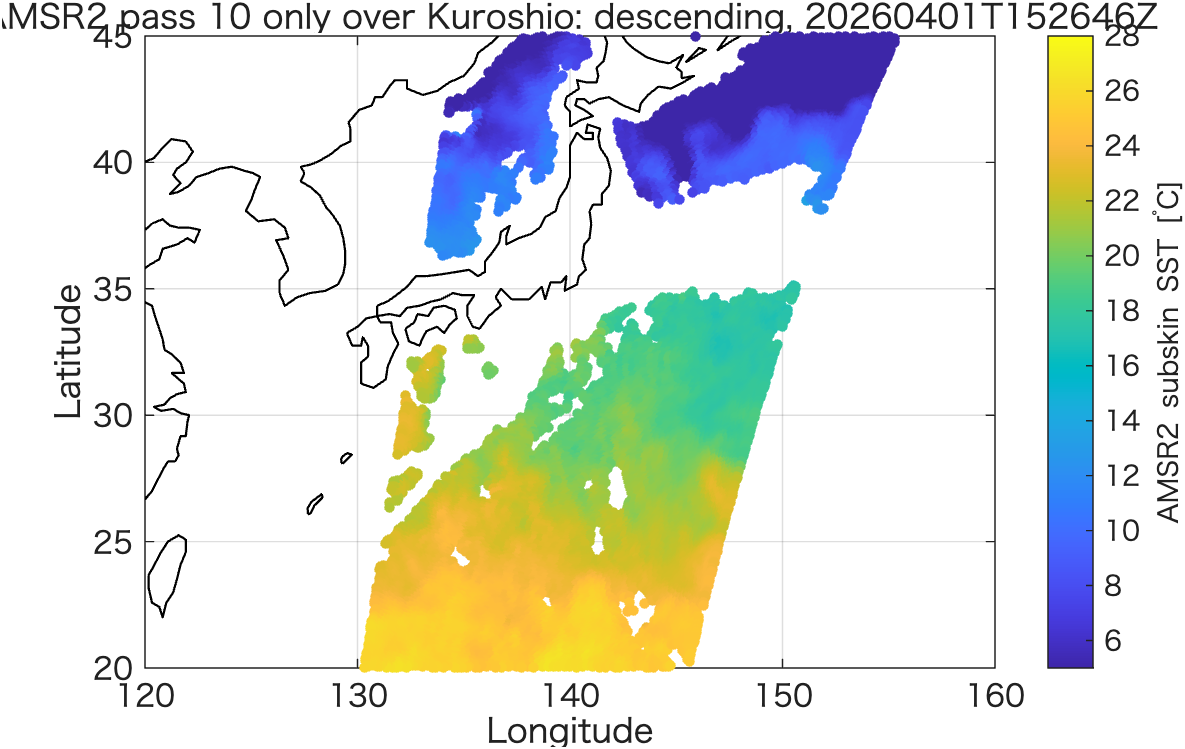
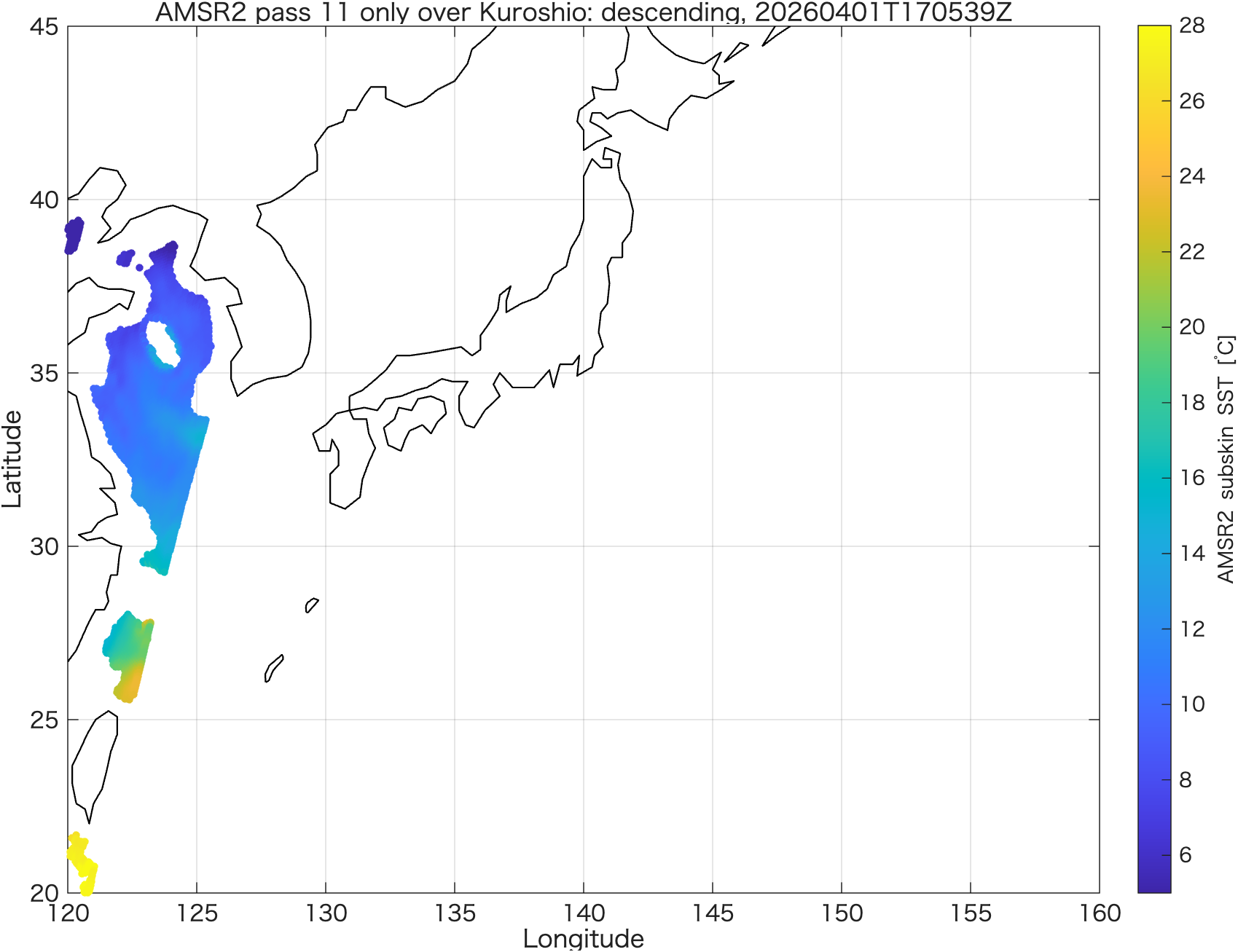
AMSR2/GHRSST L2P の各パスを確認する
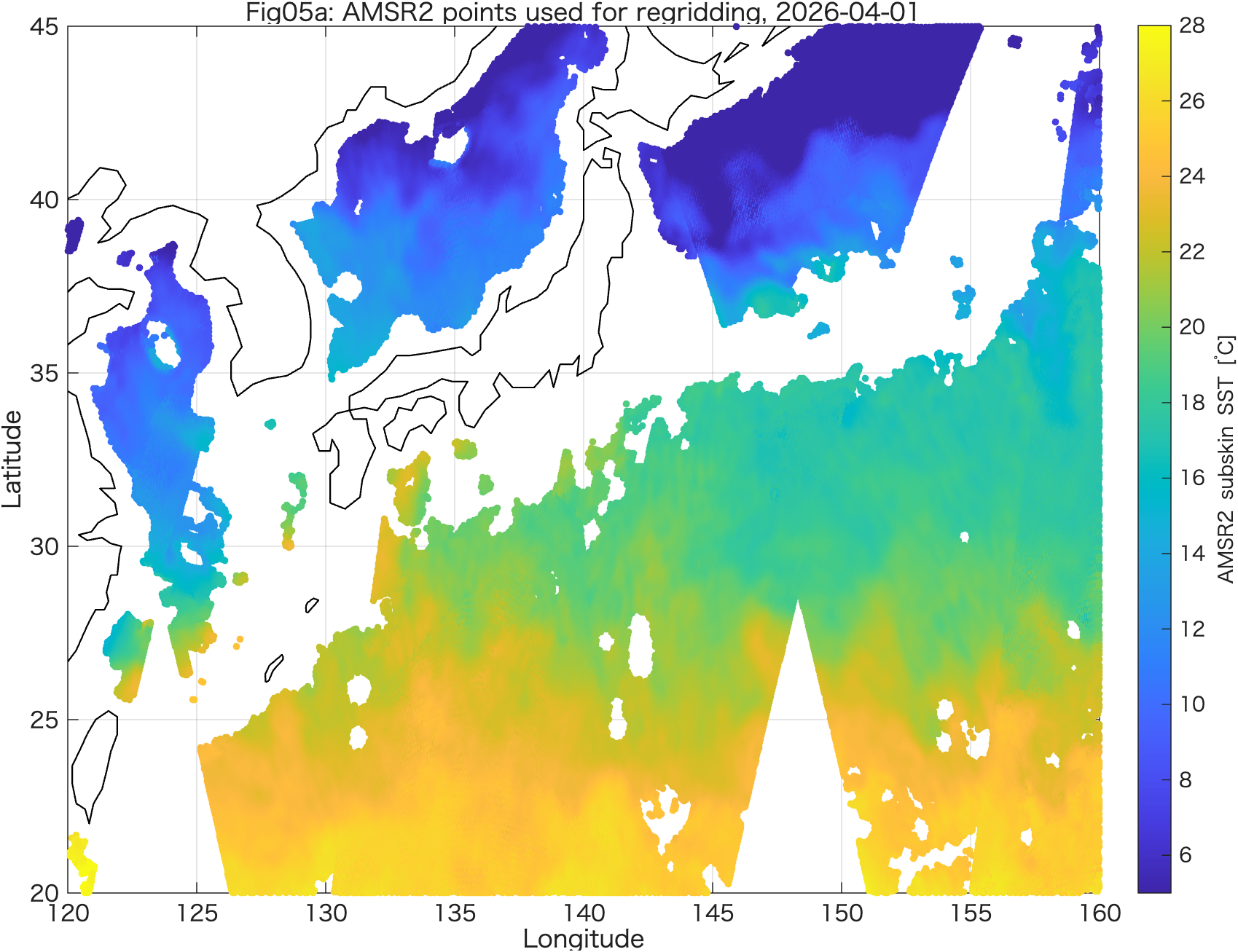
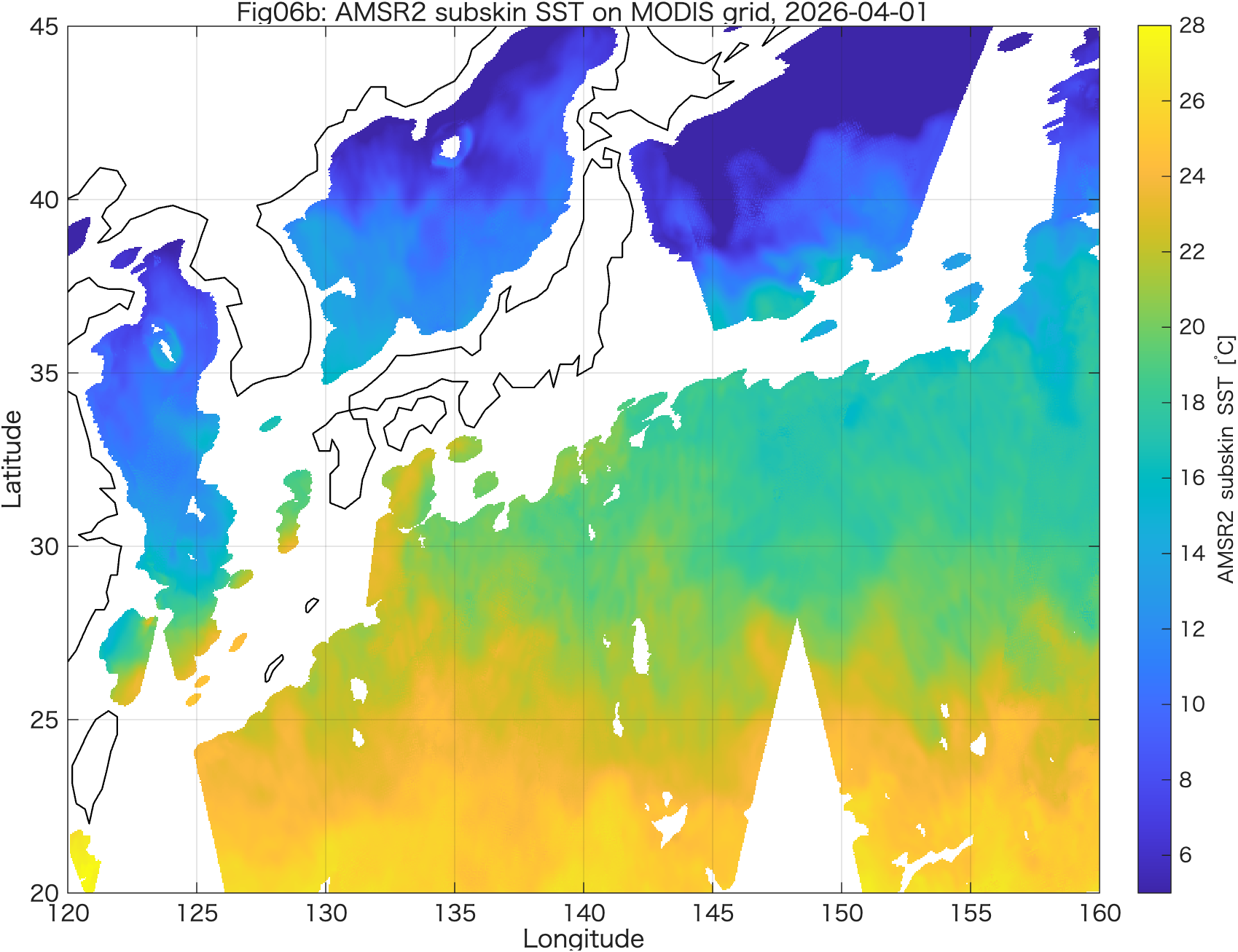
AMSR2/GHRSST は L2P swath データであり、1ファイルが1本の軌道観測に対応します。 まず全パスを読み込み、黒潮域を観測しているパスを抽出します。ここではまだ合成せず、 どのパスがどの領域を観測しているかを確認します。
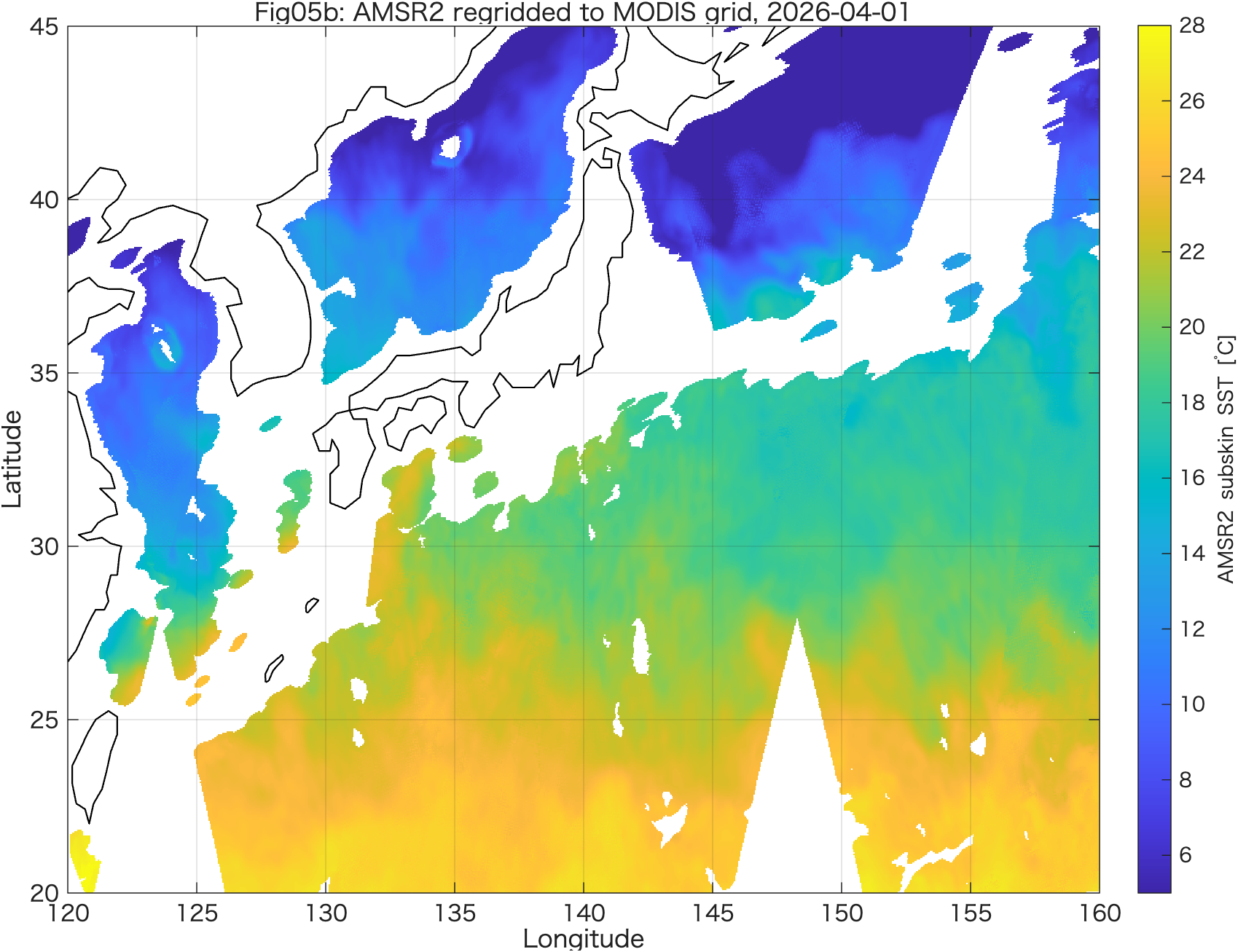
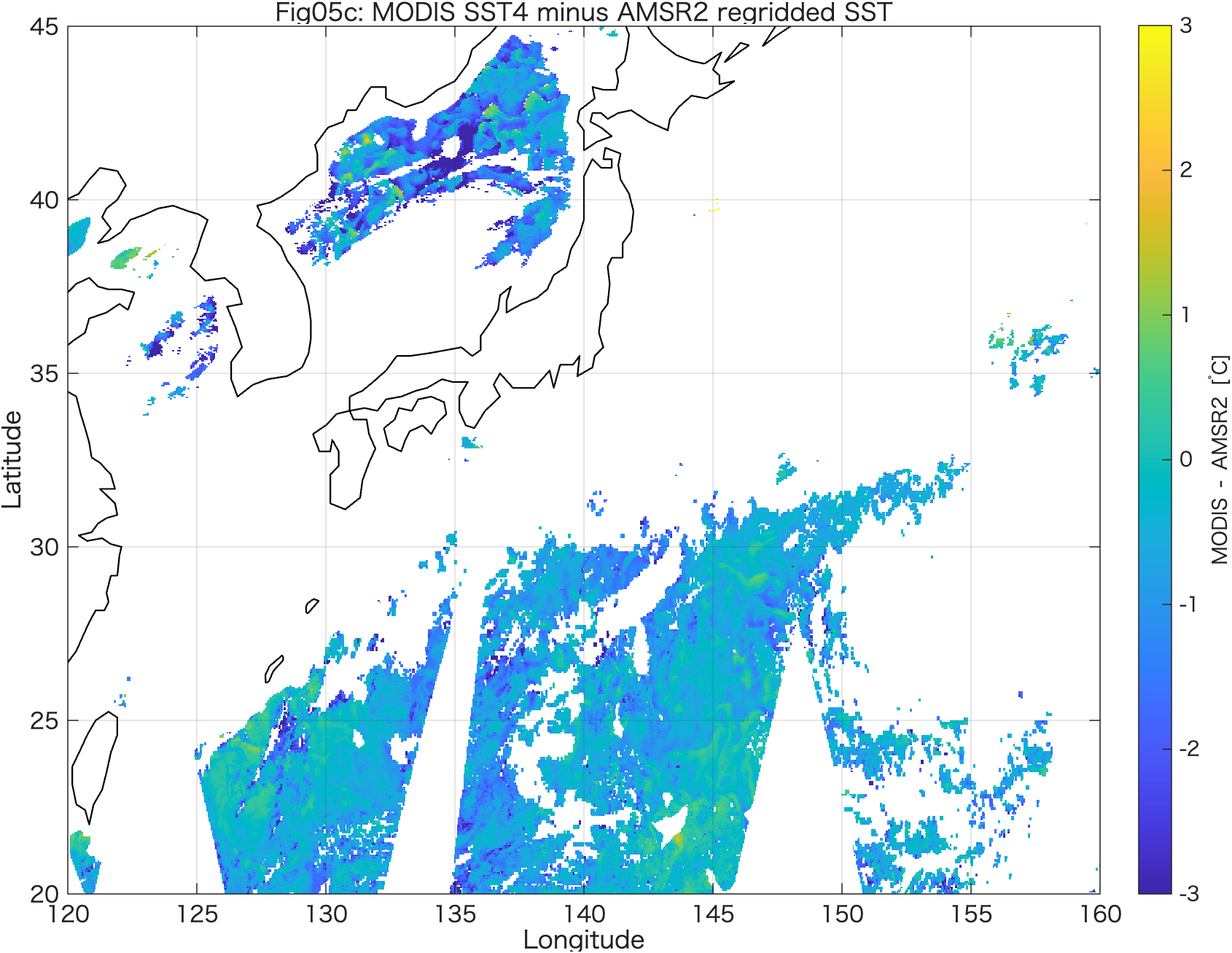
AMSR2 を MODIS 格子へ載せ、合成前の診断を行う
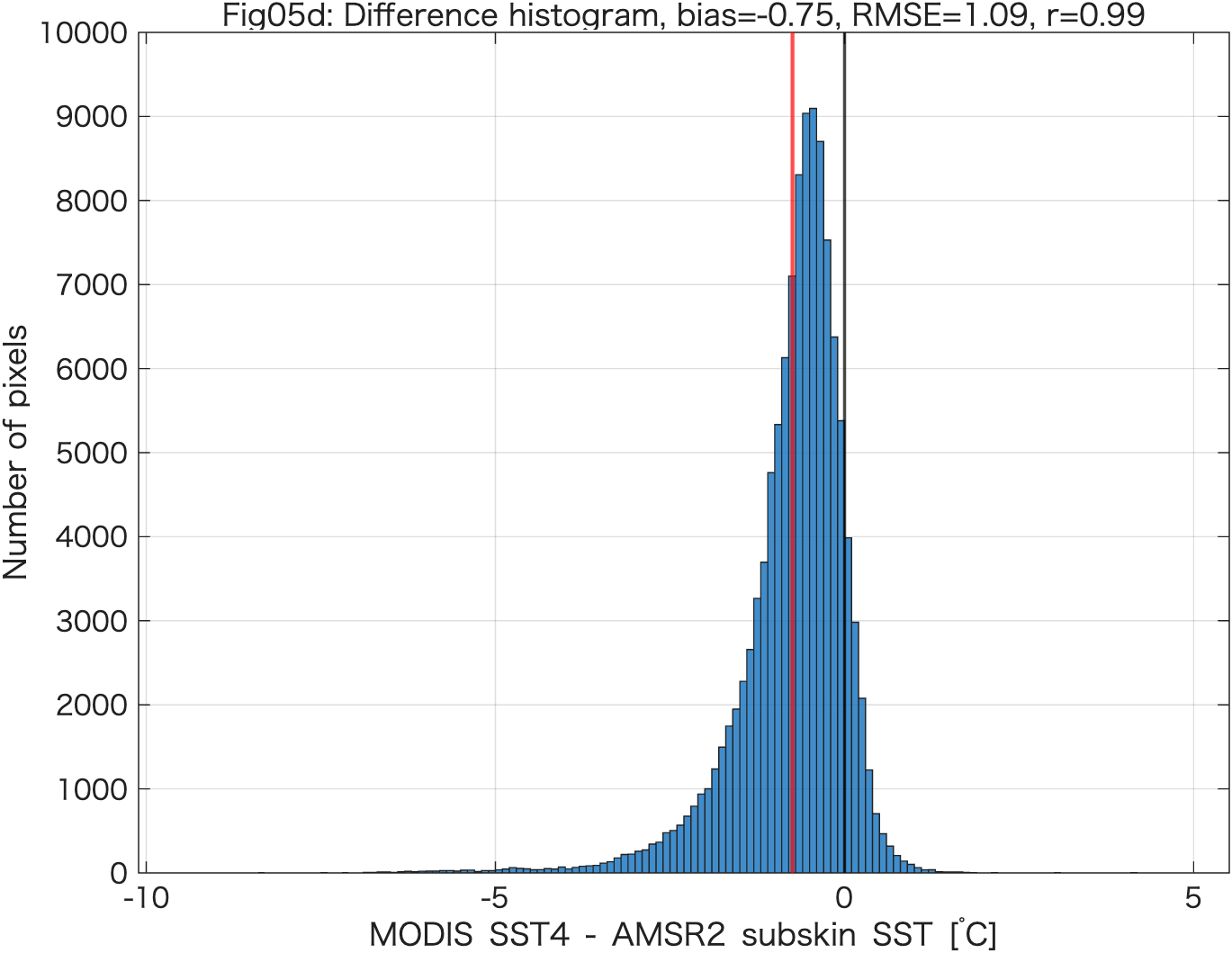
Step 3 は合成ではありません。AMSR2 の swath 観測を MODIS の緯度経度格子に載せ、両者が重なる場所で MODIS − AMSR2 の差を評価します。これにより、AMSR2 をそのまま使うか、バイアス補正して使うかを判断します。
maxDist_km = 20 は、最も近い AMSR2 実観測点から 20 km より遠い MODIS 格子点を NaN に戻すためのしきい値です。
これにより、観測されていないスワス間の隙間まで人工的に埋めることを防ぎます。
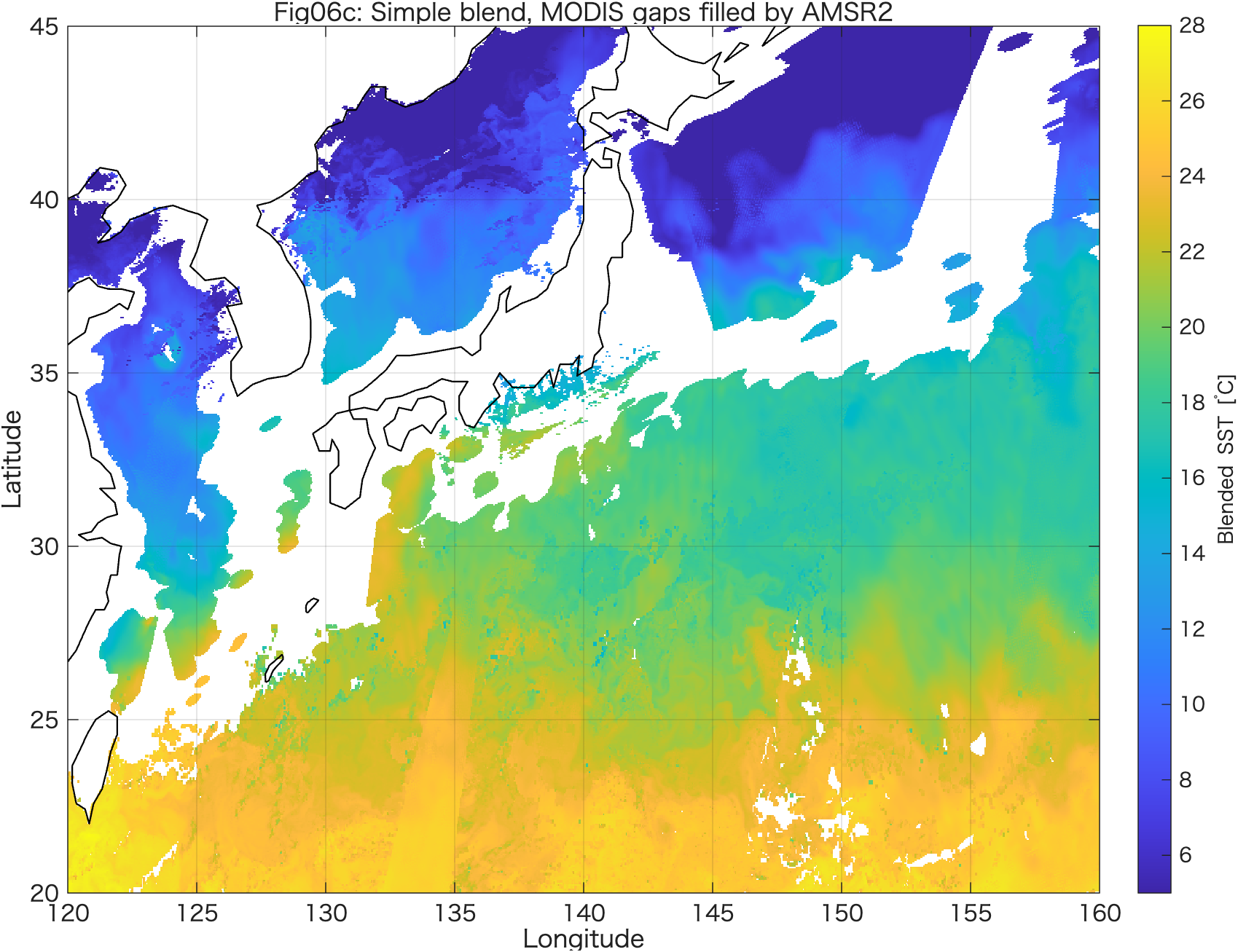
MODIS 欠損域を AMSR2 で埋める
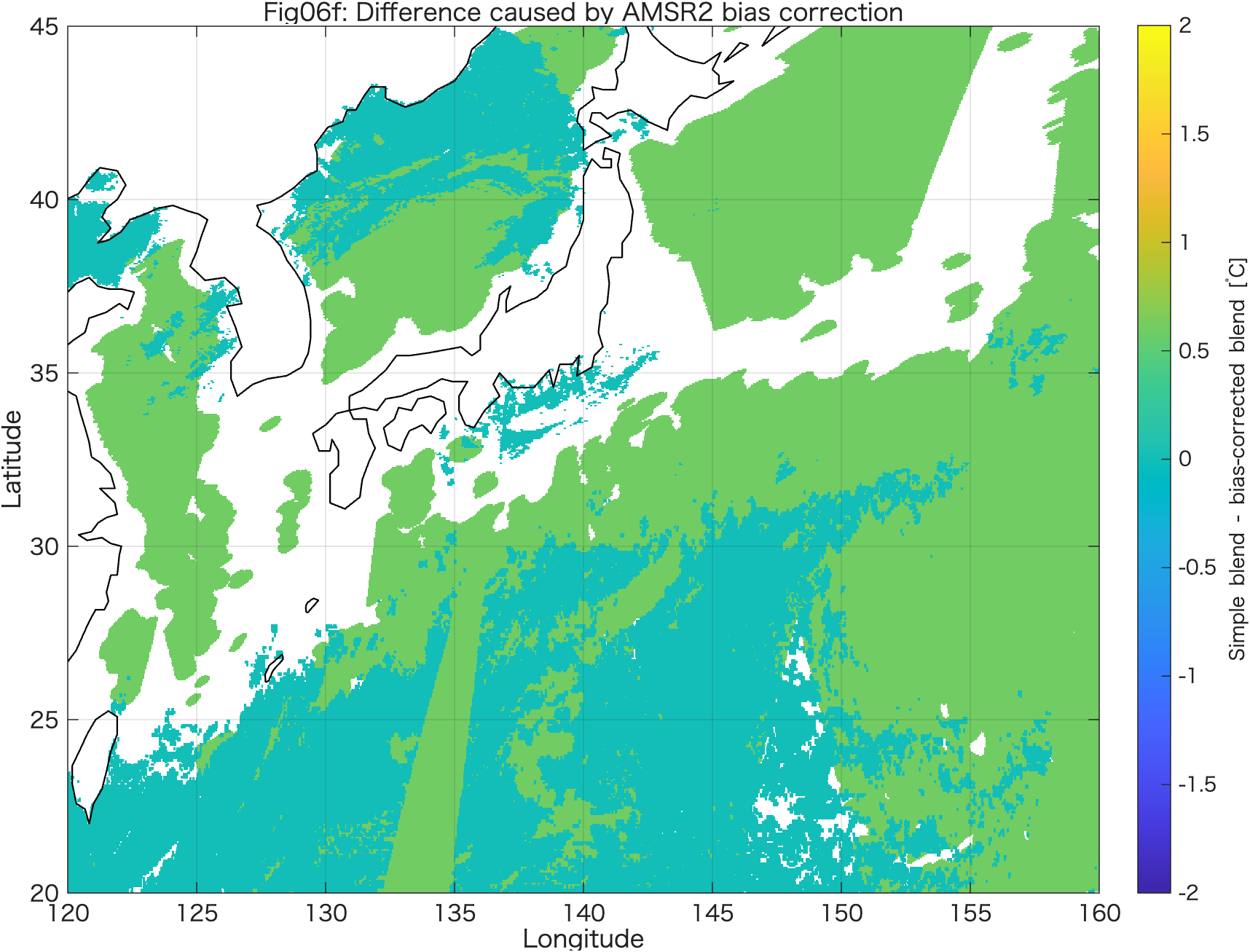
ここで初めて合成を行います。MODIS がある場所は MODIS を保持し、MODIS が欠損していて AMSR2 がある場所だけを AMSR2 で埋めます。さらに、Step 3 の重複域から求めた中央値バイアスを用いて、AMSR2 を MODIS 寄りに補正した合成場も作成します。

合成によって前線構造がどう変わったかを評価する
合成場がきれいに見えても、MODIS の 4 km 前線構造が復元されたわけではありません。
Step 5 では SST 勾配 |∇SST| を計算し、MODIS、AMSR2、simple blend、bias-corrected blend の前線強度を比較します。
最終プロダクトとして整理する
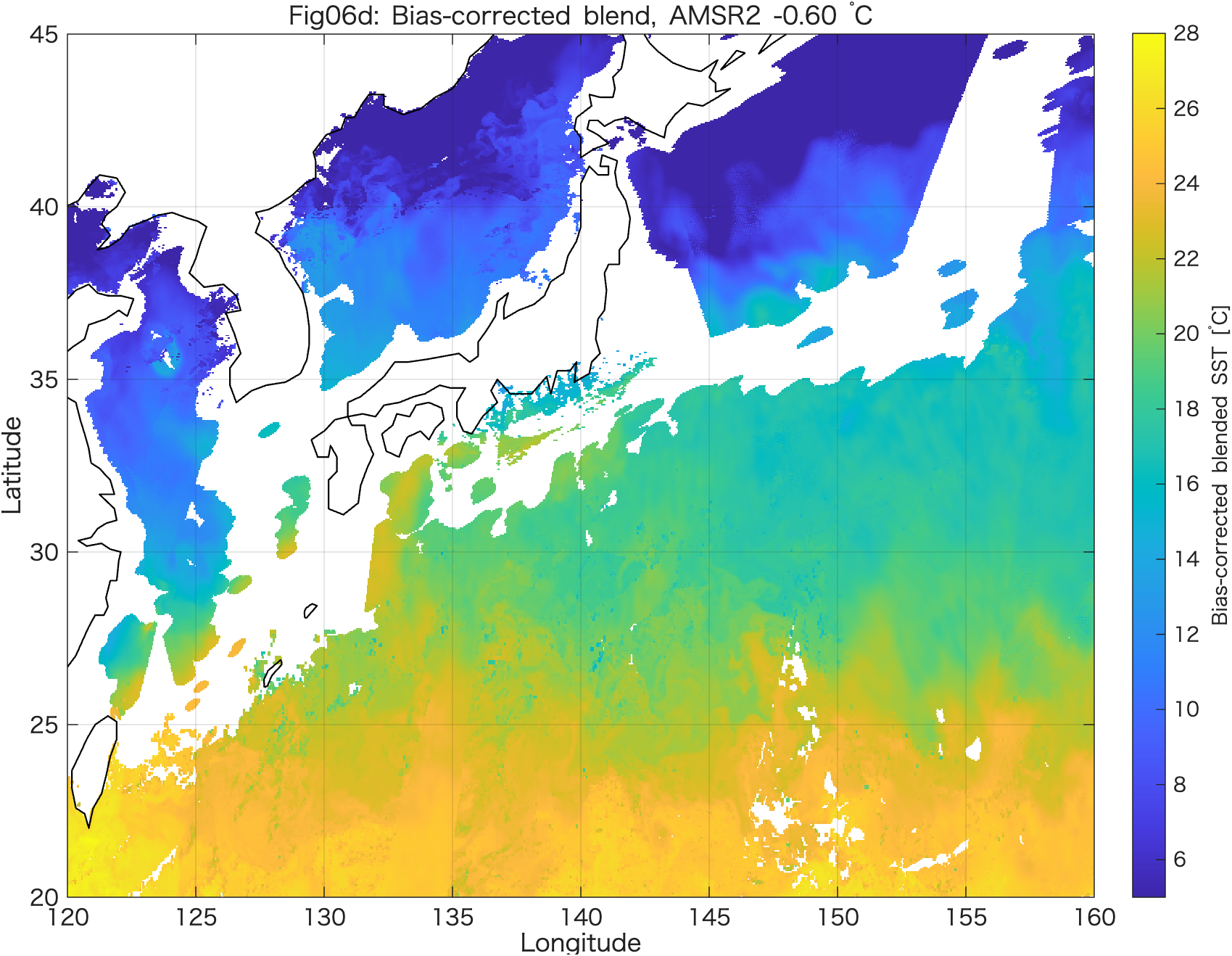
最後に bias-corrected blend を簡易最終 SST として採用し、source flag と uncertainty proxy を保持します。 最終 SST だけを見せるのではなく、どのピクセルが MODIS 由来で、どのピクセルが AMSR2 補完かを必ず同時に示します。
| 出力 | 意味 |
|---|---|
| SST_final | bias-corrected blend を採用した最終 SST。 |
| sourceFlag | 0 = no data, 1 = original MODIS, 2 = filled by AMSR2。 |
| uncertainty_proxy | 教育用の簡易不確かさマップ。正式な誤差推定ではない。 |
| grad_final | 最終 SST から計算した SST 勾配。 |
この解析で特に強調すること
- AMSR2 で MODIS の欠損を埋めることはできるが、MODIS の 4 km 情報を復元しているわけではない。
- AMSR2 を MODIS 格子へ内挿すると見た目は滑らかになるが、それは観測情報が増えたことを意味しない。
- mean bias と median bias は異なる。外れ値がある場合、中央値の方が補正値として安定することがある。
- source flag を保存しない合成 SST は危険である。最終図だけではデータ由来が分からない。
- この簡易合成と GHRSST L4/MUR のような解析場は異なる。L4 ではより高度な QC、誤差重み、時空間内挿、背景場が用いられる。
課題
- MODIS SST4 の欠損はどこに多いか。黒潮・黒潮続流の解析にどのような問題を生むか説明せよ。
- AMSR2 は MODIS 欠損域をどこまで補完できたか。Fig. 4 と Fig. 6e を用いて説明せよ。
- Fig. 5d の MODIS − AMSR2 のヒストグラムを解釈せよ。平均バイアスと中央値バイアスの違いは何か。補正にはどちらを使うべきか、自分の判断を述べよ。
maxDist_kmを 10, 20, 30, 50 km に変えた場合、AMSR2 補完範囲、バイアス、RMSE、最終図はどう変わると考えられるか。少なくとも2条件を比較せよ。use_quality_level_minを 5 から 4 に緩めた場合、coverage と信頼性はどのように変わるか考察せよ。- 単純合成とバイアス補正合成の違いを説明せよ。今回の一様バイアス補正は十分か、それとも場所依存の補正が必要か。
- 合成 SST を用いて黒潮前線や MHW を解析する場合、どのような注意が必要か。source flag と SST 勾配の観点から述べよ。
- この簡易合成と GHRSST L4/MUR のような gap-free SST 解析場の違いを説明せよ。