これまでの研究で、6足モデルが平地を歩行するシミュレーションを行ってきた。
リンク:研究メモ>GAシミュレーション
リンク:研究メモ>GAシミュレーション その2
そこで、次のステップとして実際の干潟に含まれている沼地や水域での移動シミュレーションを行うことを考える。
今回は、これらの環境をGazeboで再現する方法として、以下の3つの方法を検討した。
(1)ボールプール(水域および沼地環境の再現)
(2)CFMパラメータの設定(沼地環境の再現)
(3)水中動作を再現(水中環境の再現)
(1)ボールプール(水域および沼地環境の再現)
まず初めに、水域および沼地環境の再現方法として、ボールプールを用いることを検討した。
ここでは、液体と泥を微小な粒子の集合だと考え、以下の図1の様に大量の球オブジェクトによってボールプールを作成し、環境の再現を行った。
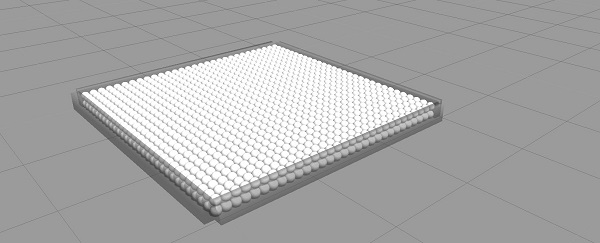
図1 Gazeboで作成したボールプール
今回は、ロボットが沼地を歩行することを想定して、モデルの脚の半分以上が埋まるようにボールプールを作成した。
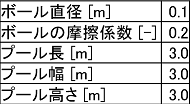
以下にボールプールの詳細を示す。
表1 ボールプールのプロパティ
このボールプール内で、静歩行のパラメータを使用した歩行プログラムを10秒間動作させた。
以下に、シミュレーション時の動画を示す。