非線形同期により群れを構成する生物を模範として自律した管制システムを研究する。
本機能を自転車の安全装置として応用する物である。
成果発表
1. 平成28年度海洋理工学会秋季大会
「非線型引き込みをベースとしたSWARM用通信装置の開発」
2. AROB 22nd 2017
"Development of the Visible Light Communication Device for Swarm Using
Nonlinear Synchronizing"
3. 第49回計測自動制御学会北海道支部学術講演会
「非線形引き込みを使った海中可視光通信装置の開発」
4. 平成29年度海洋理工学会春季大会
「非線形引き込みを使った水中SWARM用可視光通信装置の開発」
5. 2017 China-Japan-Korea Graduates Academic Forum
"Communication Device - Visible Light Nonlinear Sync - "
6. AROB 23rd 2018
"Automatic threshold control for visible light underwater communication
device using nonlinear synchronization"
7. 第50回計測自動制御学会北海道支部学術講演会
「非線形同期を使ったSWARMの群移動制御の研究」
8. Artificial Life and Robotics (2018) 23:60-66
"Development of the Visible Light Communication Device for Swarm Using
Nonlinear Synchronization"
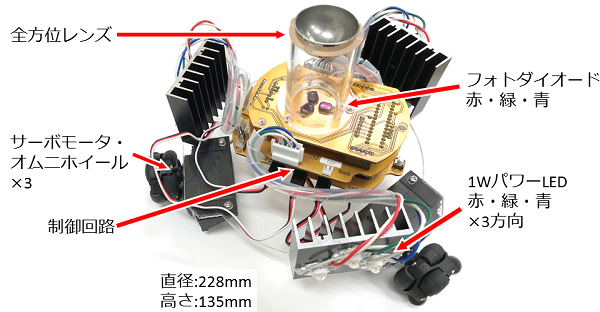
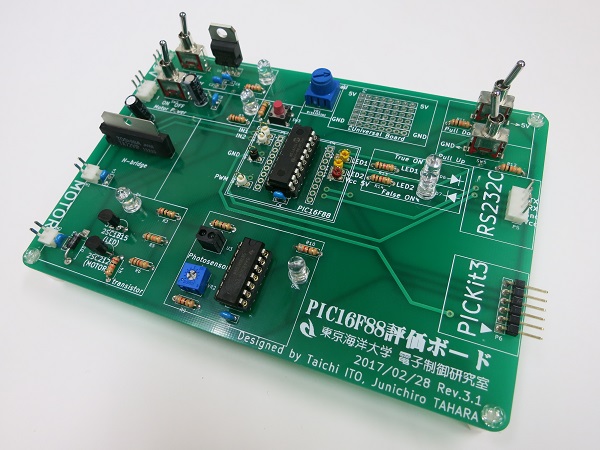
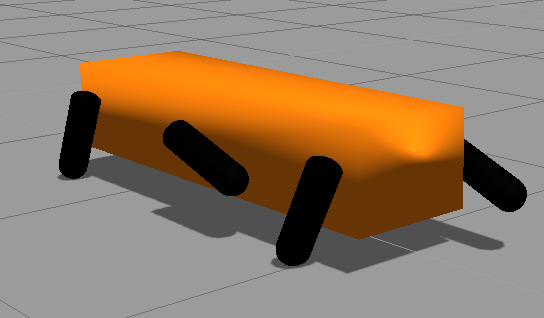
写真:本研究で作成した3輪オムニホイールの移動体
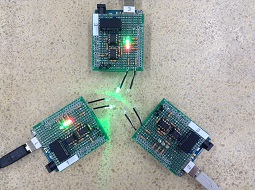
3色の光を用いて3つの異なる周期の非線形同期を発生させる手法により、3輪オムニホイールの移動体を自律管制制御することが出来た。
研究助成

代表) JKA補助事業(2016-2017)
H28-136
競輪・オートレース補助事業ホームページ「RING!RING!プロジェクト」
URL:http://ringring-keirin.jp/